CasADi-driven MPC in Simulink (part 1)
Estimated reading time: 4 minutesCasADi is not a monolithic tool. We can easily couple it to other software to have more fun. Today we’ll be exploring a simple coupling with Simulink. We’ll be showing off nonlinear MPC (NMPC).
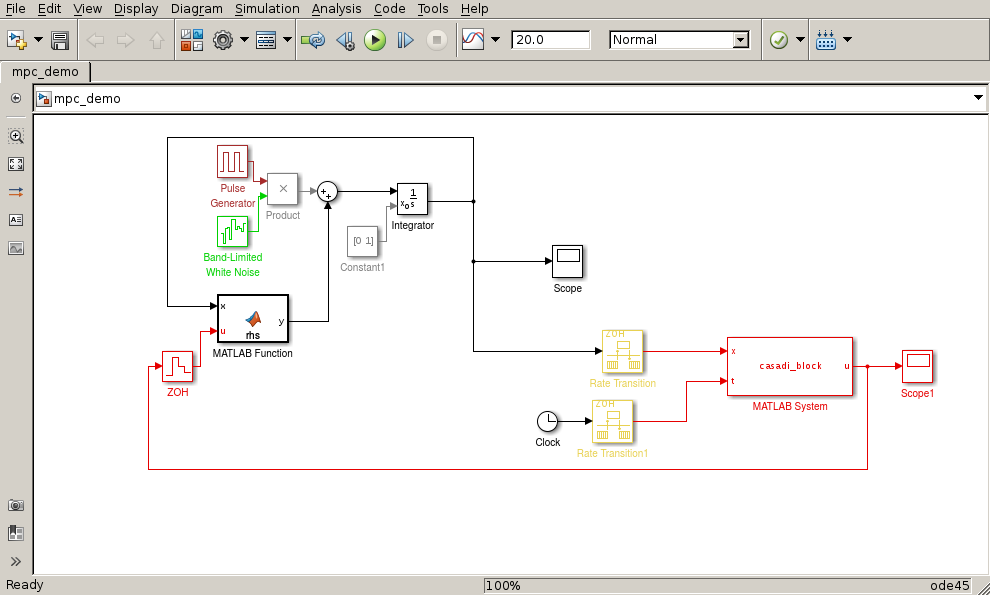
Simulink block diagram
The details
For plant model, we’ll be using the familiar Van der Pol oscillator ode:
$$ \frac{d\begin{bmatrix}x_1\\ x_2\end{bmatrix}}{dt} = \begin{bmatrix}(1-x_2^2)\, x_1-x_2+u\\ x_1\end{bmatrix}. $$
In the above Simulink block diagram, the rhs MATLAB function block encodes this ode:
function y = rhs(x,u)
y = [(1-x(2)^2)*x(1) - x(2) + u; x(1)];
end
The casadi_block computes the discrete control signal by solving an Optimal Control Problem (OCP).
The act of closing the loop with the continuous plant makes our setup effectively an MPC controller.
The OCP problem here simply drives the states to zero:
$$ \begin{align} \underset{\begin{array}{c}x(\cdot), u(\cdot)\end{array}} {\text{minimize}}\quad & \int_{0}^{T}{ \left( x_1(t)^2 + x_2(t)^2 + u(t)^2 \right) \, dt} \newline \text{subject to} \, \quad & \left\{\begin{array}{l} \dot{x}_1(t) = (1-x_2(t)^2) \, x_1(t) - x_2(t) + u(t) \newline \dot{x}_2(t) = x_1(t) \newline -1.0 \le u(t) \le 1.0, \quad x_1(t) \ge -0.25 \end{array}\right. \quad t \in [0,T] \newline & x_1(0)=\bar{x}_1, \quad x_2(0)=\bar{x}_2 \end{align} $$
We will use the multiple shooting transcription from the CasADi examples to cast the OCP to an NLP problem. In short, the multiple shooting code reads like:
w = {}; % decision variables
g = {}; % cosntraints
J = 0; % objective
% Initial conditions
X0 = MX.sym('X0', 2);
% Formulate the NLP
Xk = X0;
for k=0:N-1
% New NLP variable for the control
Uk = MX.sym('U');
w = {w{:}, Uk};
% Integrate till the end of the interval
Fk = F('x0', Xk, 'p', Uk);
Xk_end = Fk.xf;
J=J+Fk.qf;
% New NLP variable for state at end of interval
Xk = MX.sym('X', 2);
w = {w{:}, Xk};
% Add equality constraint
g = {g{:}, Xk_end-Xk};
end
% Create an NLP solver
prob = struct('f', J, 'x', vertcat(w{:}), 'g', vertcat(g{:}));
solver = nlpsol('solver', 'ipopt', prob);
Recall from that example the solution plot:
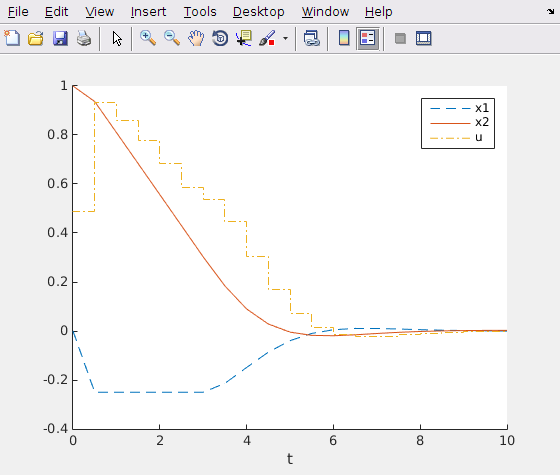
Reference solution from multiple shooting example
As we all know, CasADi makes an important distinction between initialisation and evaluation steps.
We would not want to construct an NLP afresh at every sampling time!
Rather, we’d like to construct the NLP once, and simply evaluate it repeatedly using slightly different numerical inputs.
For this purpose, we chose a MATLAB System block in Simulink.
In abbreviated form, the code in that block reads:
classdef casadi_block < matlab.System
properties (Access = private)
casadi_solver
lbx
ubx
end
methods (Access = protected)
function setupImpl(obj,~,~)
obj.casadi_solver = nlpsol('solver', 'ipopt', prob, options);
obj.lbx = lbw;
obj.ubx = ubw;
end
function u = stepImpl(obj,x,t)
lbw = obj.lbx;
ubw = obj.ubx;
solver = obj.casadi_solver;
lbw(1:2) = x;
ubw(1:2) = x;
sol = solver('x0', w0, 'lbx', lbw, 'ubx', ubw,...
'lbg', obj.lbg, 'ubg', obj.ubg);
u = full(sol.x(3));
end
end
end
As you can see, setupImpl takes care of constructing the NLP, and stepImpl solves the actual NLP while constraining $x_1(0)$ and $x_2(0)$ to the state measurement coming in from Simulink.
In general, you may distinguish several approaches to bring CasADi computations into simulink:
- write CasADi-Matlab code, and use an
interpreted Matlab codein Simulink - write CasADi-Matlab code, and use CasADi’s codegenerator to spit out a pure c function (or mex file). Then, interface that pure c function in simulink
- write a mex file from scratch using CasADi-C++ code
We used option 1 here. It’s the most simple way. Obviously this is not the most efficient way,
but since all of CasADi’s number-crunching happens in compiled libraries, interpreted Matlab code is not as bad as it sounds perhaps.
Anyway, make sure that you indicate to Simulink that the code is interpreted:
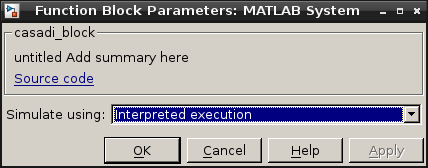
Simulink block diagram
Let’s jump to results.
The results
MPC control signal:
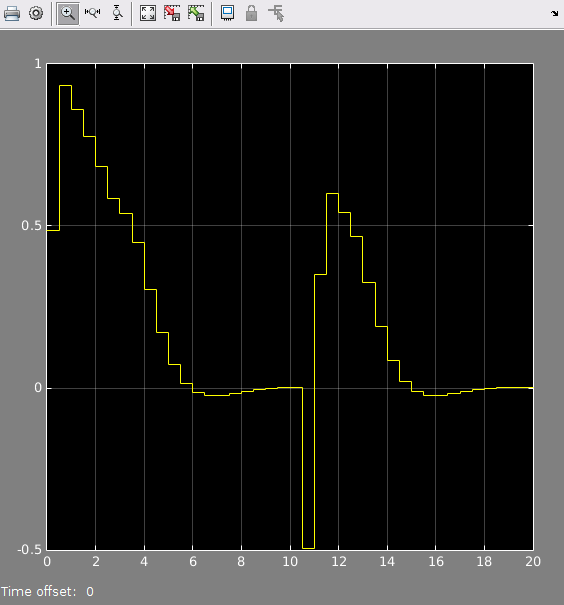
MPC control signal
State evolution:
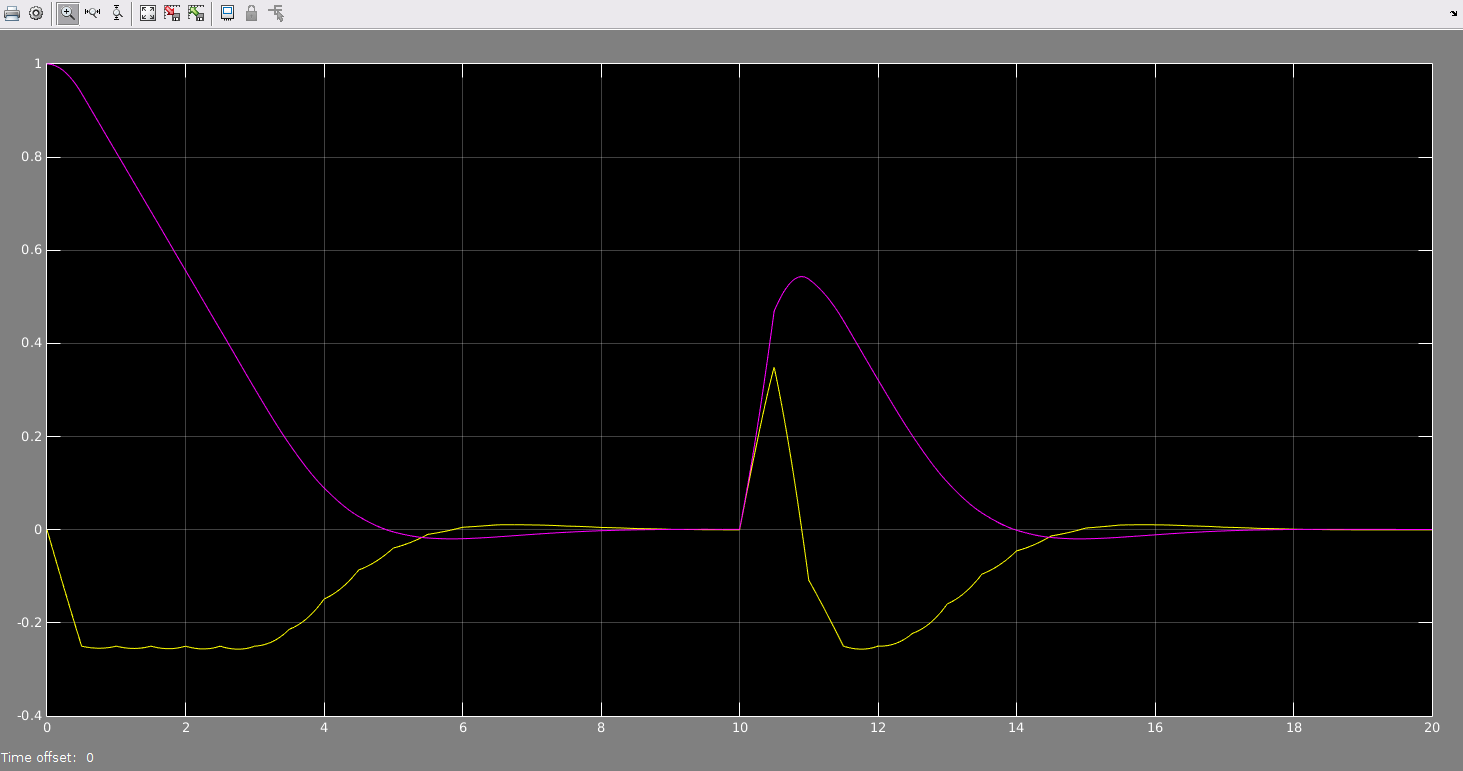
State evolution
Note how the control trajectory (up to t=10s) matches the reference solution further up in this post. The state trajectory matches too, but Simulink shows you more detail: you see the smooth time-evolution of the system in-between the sampling times. Pretty neat, huh? Just for fun, I dropped in some noised at around t=10s. The MPC controller manages to recover from this.
This post showed a quick way to drop your CasADi code into Simulink. We’re curious what you’ll cook up based on this example. Enjoy!
Downloads: casadi_block.m, mpc_demo.slx