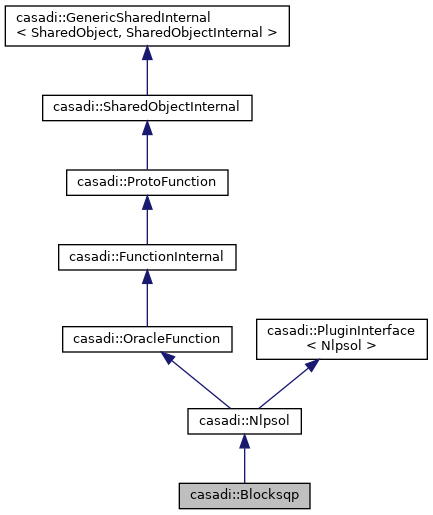
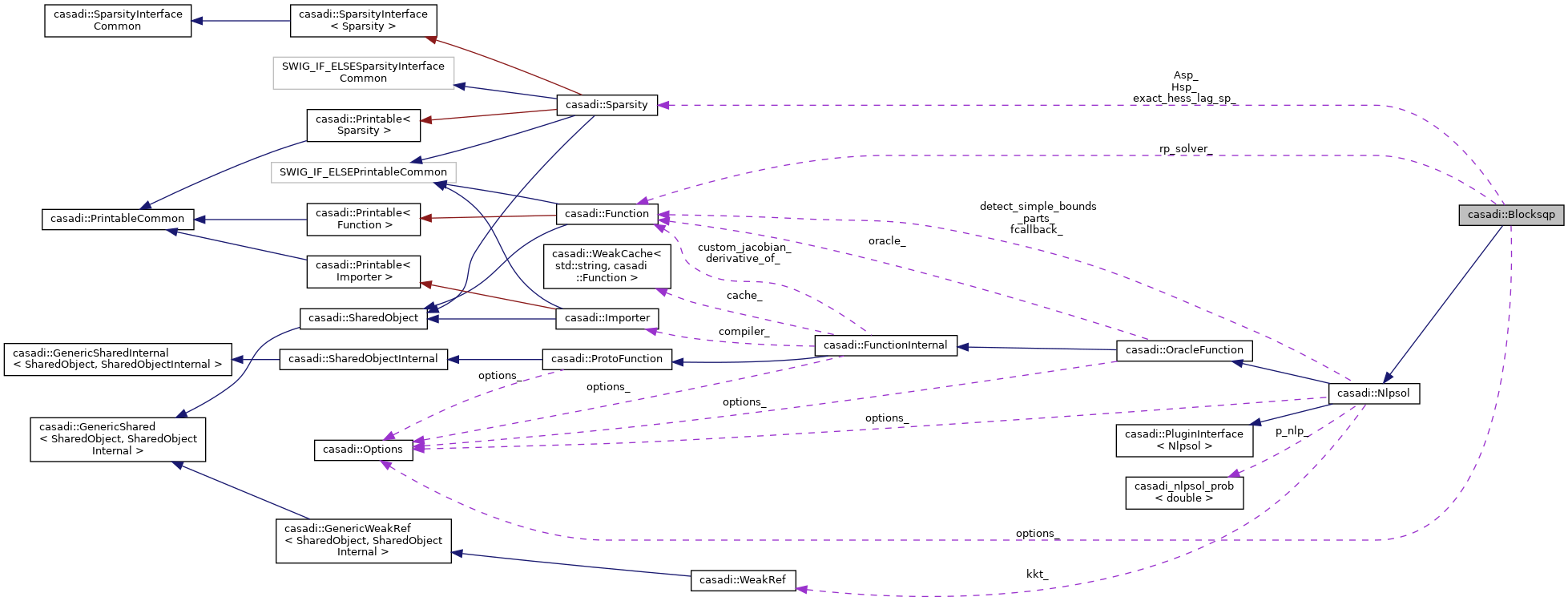
'blocksqp' plugin for Nlpsol More...
#include <blocksqp.hpp>
This is a modified version of blockSQP by Janka et al.
Extra doc: https://github.com/casadi/casadi/wiki/L_224
| Id | Type | Description |
|---|---|---|
| block_hess | OT_INT | Blockwise Hessian approximation? |
| col_eps | OT_DOUBLE | Epsilon for COL scaling strategy |
| col_tau1 | OT_DOUBLE | tau1 for COL scaling strategy |
| col_tau2 | OT_DOUBLE | tau2 for COL scaling strategy |
| conv_strategy | OT_INT | Convexification strategy |
| delta | OT_DOUBLE | Filter line search parameter, cf. IPOPT paper |
| delta_h0 | OT_DOUBLE | Filter line search parameter, cf. IPOPT paper |
| eps | OT_DOUBLE | Values smaller than this are regarded as numerically zero |
| eta | OT_DOUBLE | Filter line search parameter, cf. IPOPT paper |
| fallback_scaling | OT_INT | If indefinite update is used, the type of fallback strategy |
| fallback_update | OT_INT | If indefinite update is used, the type of fallback strategy |
| gamma_f | OT_DOUBLE | Filter line search parameter, cf. IPOPT paper |
| gamma_theta | OT_DOUBLE | Filter line search parameter, cf. IPOPT paper |
| globalization | OT_BOOL | Enable globalization |
| hess_damp | OT_INT | Activate Powell damping for BFGS |
| hess_damp_fac | OT_DOUBLE | Damping factor for BFGS Powell modification |
| hess_lim_mem | OT_INT | Full or limited memory |
| hess_memsize | OT_INT | Memory size for L-BFGS updates |
| hess_scaling | OT_INT | Scaling strategy for Hessian approximation |
| hess_update | OT_INT | Type of Hessian approximation |
| ini_hess_diag | OT_DOUBLE | Initial Hessian guess: diagonal matrix diag(iniHessDiag) |
| kappa_f | OT_DOUBLE | Filter line search parameter, cf. IPOPT paper |
| kappa_minus | OT_DOUBLE | Filter line search parameter, cf. IPOPT paper |
| kappa_plus | OT_DOUBLE | Filter line search parameter, cf. IPOPT paper |
| kappa_plus_max | OT_DOUBLE | Filter line search parameter, cf. IPOPT paper |
| kappa_soc | OT_DOUBLE | Filter line search parameter, cf. IPOPT paper |
| linsol | OT_STRING | The linear solver to be used by the QP method |
| max_consec_reduced_steps | OT_INT | Maximum number of consecutive reduced steps |
| max_consec_skipped_updates | OT_INT | Maximum number of consecutive skipped updates |
| max_conv_qp | OT_INT | How many additional QPs may be solved for convexification per iteration? |
| max_it_qp | OT_INT | Maximum number of QP iterations per SQP iteration |
| max_iter | OT_INT | Maximum number of SQP iterations |
| max_line_search | OT_INT | Maximum number of steps in line search |
| max_soc_iter | OT_INT | Maximum number of SOC line search iterations |
| max_time_qp | OT_DOUBLE | Maximum number of time in seconds per QP solve per SQP iteration |
| nlinfeastol | OT_DOUBLE | Nonlinear feasibility tolerance |
| obj_lo | OT_DOUBLE | Lower bound on objective function [-inf] |
| obj_up | OT_DOUBLE | Upper bound on objective function [inf] |
| opttol | OT_DOUBLE | Optimality tolerance |
| print_header | OT_BOOL | Print solver header at startup |
| print_iteration | OT_BOOL | Print SQP iterations |
| print_maxit_reached | OT_BOOL | Print error when maximum number of SQP iterations reached |
| qp_init | OT_BOOL | Use warmstarting |
| qpsol | OT_STRING | The QP solver to be used by the SQP method |
| qpsol_options | OT_DICT | Options to be passed to the QP solver |
| restore_feas | OT_BOOL | Use feasibility restoration phase |
| rho | OT_DOUBLE | Feasibility restoration phase parameter |
| s_f | OT_DOUBLE | Filter line search parameter, cf. IPOPT paper |
| s_theta | OT_DOUBLE | Filter line search parameter, cf. IPOPT paper |
| schur | OT_BOOL | Use qpOASES Schur compliment approach |
| skip_first_globalization | OT_BOOL | No globalization strategy in first iteration |
| theta_max | OT_DOUBLE | Filter line search parameter, cf. IPOPT paper |
| theta_min | OT_DOUBLE | Filter line search parameter, cf. IPOPT paper |
| warmstart | OT_BOOL | Use warmstarting |
| which_second_derv | OT_INT | For which block should second derivatives be provided by the user |
| zeta | OT_DOUBLE | Feasibility restoration phase parameter |
| Id | Type | Description | Used in |
|---|---|---|---|
| ad_weight | OT_DOUBLE | Weighting factor for derivative calculation.When there is an option of either using forward or reverse mode directional derivatives, the condition ad_weight*nf<=(1-ad_weight)*na is used where nf and na are estimates of the number of forward/reverse mode directional derivatives needed. By default, ad_weight is calculated automatically, but this can be overridden by setting this option. In particular, 0 means forcing forward mode and 1 forcing reverse mode. Leave unset for (class specific) heuristics. | casadi::FunctionInternal |
| ad_weight_sp | OT_DOUBLE | Weighting factor for sparsity pattern calculation calculation.Overrides default behavior. Set to 0 and 1 to force forward and reverse mode respectively. Cf. option "ad_weight". When set to -1, sparsity is completely ignored and dense matrices are used. | casadi::FunctionInternal |
| always_inline | OT_BOOL | Force inlining. | casadi::FunctionInternal |
| block_hess | OT_INT | Blockwise Hessian approximation? | casadi::Blocksqp |
| bound_consistency | OT_BOOL | Ensure that primal-dual solution is consistent with the bounds | casadi::Nlpsol |
| cache | OT_DICT | Prepopulate the function cache. Default: empty | casadi::FunctionInternal |
| calc_f | OT_BOOL | Calculate 'f' in the Nlpsol base class | casadi::Nlpsol |
| calc_g | OT_BOOL | Calculate 'g' in the Nlpsol base class | casadi::Nlpsol |
| calc_lam_p | OT_BOOL | Calculate 'lam_p' in the Nlpsol base class | casadi::Nlpsol |
| calc_lam_x | OT_BOOL | Calculate 'lam_x' in the Nlpsol base class | casadi::Nlpsol |
| calc_multipliers | OT_BOOL | Calculate Lagrange multipliers in the Nlpsol base class | casadi::Nlpsol |
| col_eps | OT_DOUBLE | Epsilon for COL scaling strategy | casadi::Blocksqp |
| col_tau1 | OT_DOUBLE | tau1 for COL scaling strategy | casadi::Blocksqp |
| col_tau2 | OT_DOUBLE | tau2 for COL scaling strategy | casadi::Blocksqp |
| common_options | OT_DICT | Options for auto-generated functions | casadi::OracleFunction |
| compiler | OT_STRING | Just-in-time compiler plugin to be used. | casadi::FunctionInternal |
| conv_strategy | OT_INT | Convexification strategy | casadi::Blocksqp |
| custom_jacobian | OT_FUNCTION | Override CasADi's AD. Use together with 'jac_penalty': 0. Note: Highly experimental. Syntax may break often. | casadi::FunctionInternal |
| delta | OT_DOUBLE | Filter line search parameter, cf. IPOPT paper | casadi::Blocksqp |
| delta_h0 | OT_DOUBLE | Filter line search parameter, cf. IPOPT paper | casadi::Blocksqp |
| der_options | OT_DICT | Default options to be used to populate forward_options, reverse_options, and jacobian_options before those options are merged in. | casadi::FunctionInternal |
| derivative_of | OT_FUNCTION | The function is a derivative of another function. The type of derivative (directional derivative, Jacobian) is inferred from the function name. | casadi::FunctionInternal |
| detect_simple_bounds | OT_BOOL | Automatically detect simple bounds (lbx/ubx) (default false). This is hopefully beneficial to speed and robustness but may also have adverse affects: 1) Subtleties in heuristics and stopping criteria may change the solution, 2) IPOPT may lie about multipliers of simple equality bounds unless 'fixed_variable_treatment' is set to 'relax_bounds'. | casadi::Nlpsol |
| detect_simple_bounds_is_simple | OT_BOOLVECTOR | For internal use only. | casadi::Nlpsol |
| detect_simple_bounds_parts | OT_FUNCTION | For internal use only. | casadi::Nlpsol |
| detect_simple_bounds_target_x | OT_INTVECTOR | For internal use only. | casadi::Nlpsol |
| discrete | OT_BOOLVECTOR | Indicates which of the variables are discrete, i.e. integer-valued | casadi::Nlpsol |
| dump | OT_BOOL | Dump function to file upon first evaluation. [false] | casadi::FunctionInternal |
| dump_dir | OT_STRING | Directory to dump inputs/outputs to. Make sure the directory exists [.] | casadi::FunctionInternal |
| dump_format | OT_STRING | Choose file format to dump matrices. See DM.from_file [mtx] | casadi::FunctionInternal |
| dump_in | OT_BOOL | Dump numerical values of inputs to file (readable with DM.from_file) [default: false] A counter is used to generate unique names. The counter may be reset using reset_dump_count. | casadi::FunctionInternal |
| dump_out | OT_BOOL | Dump numerical values of outputs to file (readable with DM.from_file) [default: false] A counter is used to generate unique names. The counter may be reset using reset_dump_count. | casadi::FunctionInternal |
| enable_fd | OT_BOOL | Enable derivative calculation by finite differencing. [default: false]] | casadi::FunctionInternal |
| enable_forward | OT_BOOL | Enable derivative calculation using generated functions for Jacobian-times-vector products - typically using forward mode AD - if available. [default: true] | casadi::FunctionInternal |
| enable_jacobian | OT_BOOL | Enable derivative calculation using generated functions for Jacobians of all differentiable outputs with respect to all differentiable inputs - if available. [default: true] | casadi::FunctionInternal |
| enable_reverse | OT_BOOL | Enable derivative calculation using generated functions for transposed Jacobian-times-vector products - typically using reverse mode AD - if available. [default: true] | casadi::FunctionInternal |
| eps | OT_DOUBLE | Values smaller than this are regarded as numerically zero | casadi::Blocksqp |
| equality | OT_BOOLVECTOR | Indicate an upfront hint which of the constraints are equalities. Some solvers may be able to exploit this knowledge. When true, the corresponding lower and upper bounds are assumed equal. When false, the corresponding bounds may be equal or different. | casadi::Nlpsol |
| error_on_fail | OT_BOOL | Throw exceptions when function evaluation fails (default true). | casadi::ProtoFunction |
| eta | OT_DOUBLE | Filter line search parameter, cf. IPOPT paper | casadi::Blocksqp |
| eval_errors_fatal | OT_BOOL | When errors occur during evaluation of f,g,...,stop the iterations | casadi::Nlpsol |
| expand | OT_BOOL | Replace MX with SX expressions in problem formulation [false] This happens before creating derivatives unless indicated by postpone_expand | casadi::OracleFunction |
| external_transform | OT_VECTORVECTOR | List of external_transform instruction arguments. Default: empty | casadi::FunctionInternal |
| fallback_scaling | OT_INT | If indefinite update is used, the type of fallback strategy | casadi::Blocksqp |
| fallback_update | OT_INT | If indefinite update is used, the type of fallback strategy | casadi::Blocksqp |
| fd_method | OT_STRING | Method for finite differencing [default 'central'] | casadi::FunctionInternal |
| fd_options | OT_DICT | Options to be passed to the finite difference instance | casadi::FunctionInternal |
| forward_options | OT_DICT | Options to be passed to a forward mode constructor | casadi::FunctionInternal |
| gamma_f | OT_DOUBLE | Filter line search parameter, cf. IPOPT paper | casadi::Blocksqp |
| gamma_theta | OT_DOUBLE | Filter line search parameter, cf. IPOPT paper | casadi::Blocksqp |
| gather_stats | OT_BOOL | Deprecated option (ignored): Statistics are now always collected. | casadi::FunctionInternal |
| globalization | OT_BOOL | Enable globalization | casadi::Blocksqp |
| hess_damp | OT_INT | Activate Powell damping for BFGS | casadi::Blocksqp |
| hess_damp_fac | OT_DOUBLE | Damping factor for BFGS Powell modification | casadi::Blocksqp |
| hess_lim_mem | OT_INT | Full or limited memory | casadi::Blocksqp |
| hess_memsize | OT_INT | Memory size for L-BFGS updates | casadi::Blocksqp |
| hess_scaling | OT_INT | Scaling strategy for Hessian approximation | casadi::Blocksqp |
| hess_update | OT_INT | Type of Hessian approximation | casadi::Blocksqp |
| ignore_check_vec | OT_BOOL | If set to true, the input shape of F will not be checked. | casadi::Nlpsol |
| ini_hess_diag | OT_DOUBLE | Initial Hessian guess: diagonal matrix diag(iniHessDiag) | casadi::Blocksqp |
| input_scheme | OT_STRINGVECTOR | Deprecated option (ignored) | casadi::FunctionInternal |
| inputs_check | OT_BOOL | Throw exceptions when the numerical values of the inputs don't make sense | casadi::FunctionInternal |
| is_diff_in | OT_BOOLVECTOR | Indicate for each input if it should be differentiable. | casadi::FunctionInternal |
| is_diff_out | OT_BOOLVECTOR | Indicate for each output if it should be differentiable. | casadi::FunctionInternal |
| iteration_callback | OT_FUNCTION | A function that will be called at each iteration with the solver as input. Check documentation of Callback. | casadi::Nlpsol |
| iteration_callback_ignore_errors | OT_BOOL | If set to true, errors thrown by iteration_callback will be ignored. | casadi::Nlpsol |
| iteration_callback_step | OT_INT | Only call the callback function every few iterations. | casadi::Nlpsol |
| jac_penalty | OT_DOUBLE | When requested for a number of forward/reverse directions, it may be cheaper to compute first the full jacobian and then multiply with seeds, rather than obtain the requested directions in a straightforward manner. Casadi uses a heuristic to decide which is cheaper. A high value of 'jac_penalty' makes it less likely for the heurstic to chose the full Jacobian strategy. The special value -1 indicates never to use the full Jacobian strategy | casadi::FunctionInternal |
| jacobian_options | OT_DICT | Options to be passed to a Jacobian constructor | casadi::FunctionInternal |
| jit | OT_BOOL | Use just-in-time compiler to speed up the evaluation | casadi::FunctionInternal |
| jit_cleanup | OT_BOOL | Cleanup up the temporary source file that jit creates. Default: true | casadi::FunctionInternal |
| jit_name | OT_STRING | The file name used to write out code. The actual file names used depend on 'jit_temp_suffix' and include extensions. Default: 'jit_tmp' | casadi::FunctionInternal |
| jit_options | OT_DICT | Options to be passed to the jit compiler. | casadi::FunctionInternal |
| jit_serialize | OT_STRING | Specify behaviour when serializing a jitted function: SOURCE|link|embed. | casadi::FunctionInternal |
| jit_temp_suffix | OT_BOOL | Use a temporary (seemingly random) filename suffix for generated code and libraries. This is desired for thread-safety. This behaviour may defeat caching compiler wrappers. Default: true | casadi::FunctionInternal |
| kappa_f | OT_DOUBLE | Filter line search parameter, cf. IPOPT paper | casadi::Blocksqp |
| kappa_minus | OT_DOUBLE | Filter line search parameter, cf. IPOPT paper | casadi::Blocksqp |
| kappa_plus | OT_DOUBLE | Filter line search parameter, cf. IPOPT paper | casadi::Blocksqp |
| kappa_plus_max | OT_DOUBLE | Filter line search parameter, cf. IPOPT paper | casadi::Blocksqp |
| kappa_soc | OT_DOUBLE | Filter line search parameter, cf. IPOPT paper | casadi::Blocksqp |
| linsol | OT_STRING | The linear solver to be used by the QP method | casadi::Blocksqp |
| max_consec_reduced_steps | OT_INT | Maximum number of consecutive reduced steps | casadi::Blocksqp |
| max_consec_skipped_updates | OT_INT | Maximum number of consecutive skipped updates | casadi::Blocksqp |
| max_conv_qp | OT_INT | How many additional QPs may be solved for convexification per iteration? | casadi::Blocksqp |
| max_io | OT_INT | Acceptable number of inputs and outputs. Warn if exceeded. | casadi::FunctionInternal |
| max_it_qp | OT_INT | Maximum number of QP iterations per SQP iteration | casadi::Blocksqp |
| max_iter | OT_INT | Maximum number of SQP iterations | casadi::Blocksqp |
| max_line_search | OT_INT | Maximum number of steps in line search | casadi::Blocksqp |
| max_num_dir | OT_INT | Specify the maximum number of directions for derivative functions. Overrules the builtin optimized_num_dir. | casadi::FunctionInternal |
| max_soc_iter | OT_INT | Maximum number of SOC line search iterations | casadi::Blocksqp |
| max_time_qp | OT_DOUBLE | Maximum number of time in seconds per QP solve per SQP iteration | casadi::Blocksqp |
| min_lam | OT_DOUBLE | Minimum allowed multiplier value | casadi::Nlpsol |
| monitor | OT_STRINGVECTOR | Set of user problem functions to be monitored | casadi::OracleFunction |
| never_inline | OT_BOOL | Forbid inlining. | casadi::FunctionInternal |
| nlinfeastol | OT_DOUBLE | Nonlinear feasibility tolerance | casadi::Blocksqp |
| no_nlp_grad | OT_BOOL | Prevent the creation of the 'nlp_grad' function | casadi::Nlpsol |
| obj_lo | OT_DOUBLE | Lower bound on objective function [-inf] | casadi::Blocksqp |
| obj_up | OT_DOUBLE | Upper bound on objective function [inf] | casadi::Blocksqp |
| opttol | OT_DOUBLE | Optimality tolerance | casadi::Blocksqp |
| oracle_options | OT_DICT | Options to be passed to the oracle function | casadi::Nlpsol |
| output_scheme | OT_STRINGVECTOR | Deprecated option (ignored) | casadi::FunctionInternal |
| post_expand | OT_BOOL | After construction, expand this Function. Default: False | casadi::FunctionInternal |
| post_expand_options | OT_DICT | Options to be passed to post-construction expansion. Default: empty | casadi::FunctionInternal |
| postpone_expand | OT_BOOL | When expand is active, postpone it until after creation of derivatives. Default: False | casadi::OracleFunction |
| print_canonical | OT_BOOL | When printing numerical matrices, use a format that is exact and reproducible in generated C code. | casadi::FunctionInternal |
| print_header | OT_BOOL | Print solver header at startup | casadi::Blocksqp |
| print_in | OT_BOOL | Print numerical values of inputs [default: false] | casadi::FunctionInternal |
| print_iteration | OT_BOOL | Print SQP iterations | casadi::Blocksqp |
| print_maxit_reached | OT_BOOL | Print error when maximum number of SQP iterations reached | casadi::Blocksqp |
| print_out | OT_BOOL | Print numerical values of outputs [default: false] | casadi::FunctionInternal |
| print_time | OT_BOOL | print information about execution time. Implies record_time. | casadi::ProtoFunction |
| qp_init | OT_BOOL | Use warmstarting | casadi::Blocksqp |
| qpsol | OT_STRING | The QP solver to be used by the SQP method | casadi::Blocksqp |
| qpsol_options | OT_DICT | Options to be passed to the QP solver | casadi::Blocksqp |
| record_time | OT_BOOL | record information about execution time, for retrieval with stats(). | casadi::ProtoFunction |
| regularity_check | OT_BOOL | Throw exceptions when NaN or Inf appears during evaluation | casadi::ProtoFunction |
| restore_feas | OT_BOOL | Use feasibility restoration phase | casadi::Blocksqp |
| reverse_options | OT_DICT | Options to be passed to a reverse mode constructor | casadi::FunctionInternal |
| rho | OT_DOUBLE | Feasibility restoration phase parameter | casadi::Blocksqp |
| s_f | OT_DOUBLE | Filter line search parameter, cf. IPOPT paper | casadi::Blocksqp |
| s_theta | OT_DOUBLE | Filter line search parameter, cf. IPOPT paper | casadi::Blocksqp |
| schur | OT_BOOL | Use qpOASES Schur compliment approach | casadi::Blocksqp |
| sens_linsol | OT_STRING | Linear solver used for parametric sensitivities (default 'qr'). | casadi::Nlpsol |
| sens_linsol_options | OT_DICT | Linear solver options used for parametric sensitivities. | casadi::Nlpsol |
| show_eval_warnings | OT_BOOL | Show warnings generated from function evaluations [true] | casadi::OracleFunction |
| skip_first_globalization | OT_BOOL | No globalization strategy in first iteration | casadi::Blocksqp |
| specific_options | OT_DICT | Options for specific auto-generated functions, overwriting the defaults from common_options. Nested dictionary. | casadi::OracleFunction |
| theta_max | OT_DOUBLE | Filter line search parameter, cf. IPOPT paper | casadi::Blocksqp |
| theta_min | OT_DOUBLE | Filter line search parameter, cf. IPOPT paper | casadi::Blocksqp |
| user_data | OT_VOIDPTR | A user-defined field that can be used to identify the function or pass additional information | casadi::FunctionInternal |
| verbose | OT_BOOL | Verbose evaluation – for debugging | casadi::ProtoFunction |
| verbose_init | OT_BOOL | Print out timing information about the different stages of initialization | casadi::Nlpsol |
| warmstart | OT_BOOL | Use warmstarting | casadi::Blocksqp |
| warn_initial_bounds | OT_BOOL | Warn if the initial guess does not satisfy LBX and UBX | casadi::Nlpsol |
| which_second_derv | OT_INT | For which block should second derivatives be provided by the user | casadi::Blocksqp |
| zeta | OT_DOUBLE | Feasibility restoration phase parameter | casadi::Blocksqp |
Definition at line 151 of file blocksqp.hpp.
Public Types | |
| typedef Nlpsol *(* | Creator) (const std::string &name, const Function &oracle) |
| using | weak_ref_type = WeakRefInternal |
| typedef int(* | RegFcn) (Plugin *plugin) |
Public Member Functions | |
| Blocksqp (const std::string &name, const Function &nlp) | |
| ~Blocksqp () override | |
| const char * | plugin_name () const override |
| std::string | class_name () const override |
| Get type name. More... | |
| void | init (const Dict &opts) override |
| Initialize. More... | |
| void * | alloc_mem () const override |
| Create memory block. More... | |
| int | init_mem (void *mem) const override |
| Initalize memory block. More... | |
| void | free_mem (void *mem) const override |
| Free memory block. More... | |
| void | set_work (void *mem, const double **&arg, double **&res, casadi_int *&iw, double *&w) const override |
| Set the (persistent) work vectors. More... | |
| int | solve (void *mem) const override |
| casadi_int | run (BlocksqpMemory *m, casadi_int maxIt, casadi_int warmStart=0) const |
| Main Loop of SQP method. More... | |
| void | calcLagrangeGradient (BlocksqpMemory *m, const double *lam_x, const double *lam_g, const double *grad_f, const double *jacNz, double *grad_lag, casadi_int flag) const |
| Compute gradient of Lagrangian function (sparse version) More... | |
| void | calcLagrangeGradient (BlocksqpMemory *m, double *grad_lag, casadi_int flag) const |
| Overloaded function for convenience, uses current variables of SQPiterate vars. More... | |
| void | printInfo (BlocksqpMemory *m) const |
| Print information about the SQP method. More... | |
| bool | calcOptTol (BlocksqpMemory *m) const |
| Update optimization tolerance (similar to SNOPT) in current iterate. More... | |
| void | updateStepBounds (BlocksqpMemory *m, bool soc) const |
| casadi_int | solveQP (BlocksqpMemory *m, double *deltaXi, double *lambdaQP, bool matricesChanged=true) const |
| void | computeNextHessian (BlocksqpMemory *m, casadi_int idx, casadi_int maxQP) const |
| casadi_int | fullstep (BlocksqpMemory *m) const |
| No globalization strategy. More... | |
| void | acceptStep (BlocksqpMemory *m, const double *deltaXi, const double *lambdaQP, double alpha, casadi_int nSOCS) const |
| Set new primal dual iterate. More... | |
| void | acceptStep (BlocksqpMemory *m, double alpha) const |
| void | reduceStepsize (BlocksqpMemory *m, double *alpha) const |
| casadi_int | filterLineSearch (BlocksqpMemory *m) const |
| void | initializeFilter (BlocksqpMemory *m) const |
| bool | pairInFilter (BlocksqpMemory *m, double cNorm, double obj) const |
| void | augmentFilter (BlocksqpMemory *m, double cNorm, double obj) const |
| bool | secondOrderCorrection (BlocksqpMemory *m, double cNorm, double cNormTrial, double dfTdeltaXi, bool swCond, casadi_int it) const |
| void | reduceSOCStepsize (BlocksqpMemory *m, double *alphaSOC) const |
| casadi_int | feasibilityRestorationHeuristic (BlocksqpMemory *m) const |
| casadi_int | feasibilityRestorationPhase (BlocksqpMemory *m) const |
| casadi_int | kktErrorReduction (BlocksqpMemory *m) const |
| void | calcInitialHessian (BlocksqpMemory *m) const |
| void | calcInitialHessian (BlocksqpMemory *m, casadi_int b) const |
| void | resetHessian (BlocksqpMemory *m) const |
| void | resetHessian (BlocksqpMemory *m, casadi_int b) const |
| void | calcHessianUpdate (BlocksqpMemory *m, casadi_int updateType, casadi_int hessScaling) const |
| void | calcHessianUpdateLimitedMemory (BlocksqpMemory *m, casadi_int updateType, casadi_int hessScaling) const |
| void | calcHessianUpdateExact (BlocksqpMemory *m) const |
| void | calcSR1 (BlocksqpMemory *m, const double *gamma, const double *delta, casadi_int b) const |
| void | calcBFGS (BlocksqpMemory *m, const double *gamma, const double *delta, casadi_int b) const |
| void | updateDeltaGamma (BlocksqpMemory *m) const |
| void | sizeInitialHessian (BlocksqpMemory *m, const double *gamma, const double *delta, casadi_int b, casadi_int option) const |
| void | sizeHessianCOL (BlocksqpMemory *m, const double *gamma, const double *delta, casadi_int b) const |
| void | initStats (BlocksqpMemory *m) const |
| void | updateStats (BlocksqpMemory *m) const |
| void | printProgress (BlocksqpMemory *m) const |
| Print one line of output to stdout about the current iteration. More... | |
| void | reset_sqp (BlocksqpMemory *m) const |
| Reset variables that any SQP code needs. More... | |
| void | convertHessian (BlocksqpMemory *m) const |
| Convert *hess to column compressed sparse format. More... | |
| void | initIterate (BlocksqpMemory *m) const |
| Set initial filter, objective function, tolerances etc. More... | |
| casadi_int | evaluate (BlocksqpMemory *m, double *f, double *g, double *grad_f, double *jac_g) const |
| Evaluate objective and constraints, including derivatives. More... | |
| casadi_int | evaluate (BlocksqpMemory *m, const double *xk, double *f, double *g) const |
| Evaluate objective and constraints, no derivatives. More... | |
| casadi_int | evaluate (BlocksqpMemory *m, double *exact_hess_lag) const |
| Evaluate exact hessian of Lagrangian. More... | |
| double | lInfConstraintNorm (BlocksqpMemory *m, const double *xk, const double *g) const |
| void | serialize_body (SerializingStream &s) const override |
| Serialize an object without type information. More... | |
| void | serialize_type (SerializingStream &s) const override |
| Serialize type information. More... | |
| std::string | serialize_base_function () const override |
| String used to identify the immediate FunctionInternal subclass. More... | |
| void | disp_more (std::ostream &stream) const override |
| Print description. More... | |
| virtual void | check_inputs (void *mem) const |
| Check if the inputs correspond to a well-posed problem. More... | |
| double | get_default_in (casadi_int ind) const override |
| Get default input value. More... | |
| virtual bool | integer_support () const |
| Can discrete variables be treated. More... | |
| int | eval (const double **arg, double **res, casadi_int *iw, double *w, void *mem) const final |
| Evaluate numerically. More... | |
| void | codegen_declarations (CodeGenerator &g) const override |
| Generate code for the declarations of the C function. More... | |
| void | codegen_body_enter (CodeGenerator &g) const override |
| Generate code for the function body. More... | |
| void | codegen_body_exit (CodeGenerator &g) const override |
| Generate code for the function body. More... | |
| bool | uses_output () const override |
| Do the derivative functions need nondifferentiated outputs? More... | |
| Dict | get_stats (void *mem) const override |
| Get all statistics. More... | |
| int | callback (NlpsolMemory *m) const |
| Function | kkt () const |
| bool | is_a (const std::string &type, bool recursive) const override |
| Check if the function is of a particular type. More... | |
| virtual DM | getReducedHessian () |
| virtual void | setOptionsFromFile (const std::string &file) |
| Read options from parameter xml. More... | |
| void | finalize () override |
| Finalize initialization. More... | |
| void | join_results (OracleMemory *m) const |
| Combine results from different threads. More... | |
| const Function & | oracle () const override |
| Get oracle. More... | |
| void | expand () |
| Function | create_function (const Function &oracle, const std::string &fname, const std::vector< std::string > &s_in, const std::vector< std::string > &s_out, const Function::AuxOut &aux=Function::AuxOut(), const Dict &opts=Dict()) |
| Function | create_function (const std::string &fname, const std::vector< std::string > &s_in, const std::vector< std::string > &s_out, const Function::AuxOut &aux=Function::AuxOut(), const Dict &opts=Dict()) |
| Function | create_function (const std::string &fname, const std::vector< MX > &e_in, const std::vector< MX > &e_out, const std::vector< std::string > &s_in, const std::vector< std::string > &s_out, const Dict &opts=Dict()) |
| Function | create_forward (const std::string &fname, casadi_int nfwd) |
| void | set_function (const Function &fcn, const std::string &fname, bool jit=false) |
| void | set_function (const Function &fcn) |
| int | calc_function (OracleMemory *m, const std::string &fcn, const double *const *arg=nullptr, int thread_id=0) const |
| int | calc_sp_forward (const std::string &fcn, const bvec_t **arg, bvec_t **res, casadi_int *iw, bvec_t *w) const |
| int | calc_sp_reverse (const std::string &fcn, bvec_t **arg, bvec_t **res, casadi_int *iw, bvec_t *w) const |
| std::vector< std::string > | get_function () const override |
| Get list of dependency functions. More... | |
| const Function & | get_function (const std::string &name) const override |
| virtual bool | monitored (const std::string &name) const |
| bool | has_function (const std::string &fname) const override |
| std::string | generate_dependencies (const std::string &fname, const Dict &opts) const override |
| Export / Generate C code for the generated functions. More... | |
| void | jit_dependencies (const std::string &fname) override |
| JIT for dependencies. More... | |
| int | local_init_mem (void *mem) const |
| Initalize memory block. More... | |
| void | set_temp (void *mem, const double **arg, double **res, casadi_int *iw, double *w) const override |
| Set the work vectors. More... | |
| virtual std::string | getAdaptorSolverName () const |
| Obtain solver name from Adaptor. More... | |
| Dict | generate_options (const std::string &target) const override |
| Reconstruct options dict. More... | |
| void | change_option (const std::string &option_name, const GenericType &option_value) override |
| Change option after object creation for debugging. More... | |
| void | reset_dump_count () |
| Reset the counter used to name dump files. More... | |
| Function | self () const |
| Get a public class instance. More... | |
| virtual Function | factory (const std::string &name, const std::vector< std::string > &s_in, const std::vector< std::string > &s_out, const Function::AuxOut &aux, const Dict &opts) const |
| void | add_embedded (std::map< FunctionInternal *, Function > &all_fun, const Function &dep, casadi_int max_depth) const |
| virtual void | find (std::map< FunctionInternal *, Function > &all_fun, casadi_int max_depth) const |
| virtual std::vector< bool > | which_depends (const std::string &s_in, const std::vector< std::string > &s_out, casadi_int order, bool tr=false) const |
| Which variables enter with some order. More... | |
| virtual int | eval_sx (const SXElem **arg, SXElem **res, casadi_int *iw, SXElem *w, void *mem, bool always_inline, bool never_inline) const |
| Evaluate with symbolic scalars. More... | |
| virtual void | eval_mx (const MXVector &arg, MXVector &res, bool always_inline, bool never_inline) const |
| Evaluate with symbolic matrices. More... | |
| template<typename M > | |
| void | call (const std::vector< M > &arg, std::vector< M > &res, bool always_inline, bool never_inline) const |
| Call a function, templated. More... | |
| template<typename M > | |
| bool | matching_arg (const std::vector< M > &arg, casadi_int &npar) const |
| Check if input arguments that needs to be replaced. More... | |
| template<typename M > | |
| bool | matching_res (const std::vector< M > &arg, casadi_int &npar) const |
| Check if output arguments that needs to be replaced. More... | |
| template<typename M > | |
| std::vector< M > | replace_arg (const std::vector< M > &arg, casadi_int npar) const |
| Replace 0-by-0 inputs. More... | |
| template<typename M > | |
| std::vector< M > | project_arg (const std::vector< M > &arg, casadi_int npar) const |
| Project sparsities. More... | |
| template<typename M > | |
| std::vector< M > | project_res (const std::vector< M > &arg, casadi_int npar) const |
| Project sparsities. More... | |
| template<typename M > | |
| std::vector< M > | replace_res (const std::vector< M > &res, casadi_int npar) const |
| Replace 0-by-0 outputs. More... | |
| template<typename M > | |
| std::vector< std::vector< M > > | replace_fseed (const std::vector< std::vector< M >> &fseed, casadi_int npar) const |
| Replace 0-by-0 forward seeds. More... | |
| template<typename M > | |
| std::vector< std::vector< M > > | replace_fseed (const std::vector< std::vector< M > > &fseed, casadi_int npar) const |
| template<typename M > | |
| std::vector< std::vector< M > > | replace_aseed (const std::vector< std::vector< M >> &aseed, casadi_int npar) const |
| Replace 0-by-0 reverse seeds. More... | |
| template<typename M > | |
| std::vector< std::vector< M > > | replace_aseed (const std::vector< std::vector< M > > &aseed, casadi_int npar) const |
| std::vector< MX > | mapsum_mx (const std::vector< MX > &arg, const std::string ¶llelization) |
| Parallel evaluation. More... | |
| std::string | diff_prefix (const std::string &prefix) const |
| Determine prefix for differentiated functions. More... | |
| virtual Function | slice (const std::string &name, const std::vector< casadi_int > &order_in, const std::vector< casadi_int > &order_out, const Dict &opts) const |
| returns a new function with a selection of inputs/outputs of the original More... | |
| bool | has_derivative () const |
| Can derivatives be calculated in any way? More... | |
| virtual double | ad_weight () const |
| Weighting factor for chosing forward/reverse mode. More... | |
| virtual double | sp_weight () const |
| Weighting factor for chosing forward/reverse mode,. More... | |
| virtual std::vector< MX > | free_mx () const |
| Get free variables (MX) More... | |
| virtual std::vector< SX > | free_sx () const |
| Get free variables (SX) More... | |
| virtual bool | has_free () const |
| Does the function have free variables. More... | |
| virtual void | generate_lifted (Function &vdef_fcn, Function &vinit_fcn) const |
| Extract the functions needed for the Lifted Newton method. More... | |
| virtual casadi_int | n_instructions () const |
| Get the number of atomic operations. More... | |
| virtual casadi_int | instruction_id (casadi_int k) const |
| Get an atomic operation operator index. More... | |
| virtual std::vector< casadi_int > | instruction_input (casadi_int k) const |
| Get the (integer) input arguments of an atomic operation. More... | |
| virtual double | instruction_constant (casadi_int k) const |
| Get the floating point output argument of an atomic operation. More... | |
| virtual std::vector< casadi_int > | instruction_output (casadi_int k) const |
| Get the (integer) output argument of an atomic operation. More... | |
| virtual casadi_int | n_nodes () const |
| Number of nodes in the algorithm. More... | |
| virtual MX | instruction_MX (casadi_int k) const |
| get MX expression associated with instruction More... | |
| virtual SX | instructions_sx () const |
| get SX expression associated with instructions More... | |
| Function | wrap () const |
| Wrap in an Function instance consisting of only one MX call. More... | |
| Function | wrap_as_needed (const Dict &opts) const |
| Wrap in an Function instance consisting of only one MX call. More... | |
| Dict | cache () const |
| Get all functions in the cache. More... | |
| bool | incache (const std::string &fname, Function &f, const std::string &suffix="") const |
| Get function in cache. More... | |
| void | tocache (const Function &f, const std::string &suffix="") const |
| Save function to cache. More... | |
| void | tocache_if_missing (Function &f, const std::string &suffix="") const |
| Save function to cache, only if missing. More... | |
| void | codegen (CodeGenerator &g, const std::string &fname) const |
| Generate code the function. More... | |
| void | codegen_meta (CodeGenerator &g) const |
| Generate meta-information allowing a user to evaluate a generated function. More... | |
| void | codegen_sparsities (CodeGenerator &g) const |
| Codegen sparsities. More... | |
| virtual std::string | codegen_name (const CodeGenerator &g, bool ns=true) const |
| Get name in codegen. More... | |
| std::string | codegen_mem (CodeGenerator &g, const std::string &index="mem") const |
| Get thread-local memory object. More... | |
| virtual void | codegen_incref (CodeGenerator &g) const |
| Codegen incref for dependencies. More... | |
| virtual void | codegen_decref (CodeGenerator &g) const |
| Codegen decref for dependencies. More... | |
| virtual void | codegen_alloc_mem (CodeGenerator &g) const |
| Codegen decref for alloc_mem. More... | |
| virtual void | codegen_init_mem (CodeGenerator &g) const |
| Codegen decref for init_mem. More... | |
| virtual void | codegen_free_mem (CodeGenerator &g) const |
| Codegen for free_mem. More... | |
| virtual void | codegen_checkout (CodeGenerator &g) const |
| Codegen for checkout. More... | |
| virtual void | codegen_release (CodeGenerator &g) const |
| Codegen for release. More... | |
| std::string | signature (const std::string &fname) const |
| Code generate the function. More... | |
| std::string | signature_unrolled (const std::string &fname) const |
| Code generate the function. More... | |
| virtual void | codegen_body (CodeGenerator &g) const |
| Generate code for the function body. More... | |
| virtual std::string | codegen_mem_type () const |
| Thread-local memory object type. More... | |
| virtual bool | has_codegen () const |
| Is codegen supported? More... | |
| virtual void | export_code (const std::string &lang, std::ostream &stream, const Dict &options) const |
| Export function in a specific language. More... | |
| void | disp (std::ostream &stream, bool more) const override |
| Display object. More... | |
| std::string | definition () const |
| Get function signature: name:(inputs)->(outputs) More... | |
| void | print_dimensions (std::ostream &stream) const |
| Print dimensions of inputs and outputs. More... | |
| virtual std::vector< std::string > | get_free () const |
| Print free variables. More... | |
| void | get_partition (casadi_int iind, casadi_int oind, Sparsity &D1, Sparsity &D2, bool compact, bool symmetric, bool allow_forward, bool allow_reverse) const |
| Get the unidirectional or bidirectional partition. More... | |
| virtual double | get_max_in (casadi_int ind) const |
| Get largest input value. More... | |
| virtual double | get_min_in (casadi_int ind) const |
| Get smallest input value. More... | |
| virtual std::vector< double > | get_nominal_in (casadi_int ind) const |
| virtual std::vector< double > | get_nominal_out (casadi_int ind) const |
| virtual double | get_reltol () const |
| Get relative tolerance. More... | |
| virtual double | get_abstol () const |
| Get absolute tolerance. More... | |
| virtual bool | get_diff_in (casadi_int i) |
| Which inputs are differentiable. More... | |
| virtual bool | get_diff_out (casadi_int i) |
| Which outputs are differentiable. More... | |
| casadi_int | index_in (const std::string &name) const |
| Get input scheme index by name. More... | |
| casadi_int | index_out (const std::string &name) const |
| Get output scheme index by name. More... | |
| virtual int | sp_forward (const bvec_t **arg, bvec_t **res, casadi_int *iw, bvec_t *w, void *mem) const |
| Propagate sparsity forward. More... | |
| virtual int | sp_forward_block (const bvec_t **arg, bvec_t **res, casadi_int *iw, bvec_t *w, void *mem, casadi_int oind, casadi_int iind) const |
| Propagate sparsity forward, specific block. More... | |
| virtual int | sp_reverse (bvec_t **arg, bvec_t **res, casadi_int *iw, bvec_t *w, void *mem) const |
| Propagate sparsity backwards. More... | |
| void | sz_work (size_t &sz_arg, size_t &sz_res, size_t &sz_iw, size_t &sz_w) const |
| Get number of temporary variables needed. More... | |
| size_t | sz_arg () const |
| Get required length of arg field. More... | |
| size_t | sz_res () const |
| Get required length of res field. More... | |
| size_t | sz_iw () const |
| Get required length of iw field. More... | |
| size_t | sz_w () const |
| Get required length of w field. More... | |
| void | alloc_arg (size_t sz_arg, bool persistent=false) |
| Ensure required length of arg field. More... | |
| void | alloc_res (size_t sz_res, bool persistent=false) |
| Ensure required length of res field. More... | |
| void | alloc_iw (size_t sz_iw, bool persistent=false) |
| Ensure required length of iw field. More... | |
| void | alloc_w (size_t sz_w, bool persistent=false) |
| Ensure required length of w field. More... | |
| void | alloc (const Function &f, bool persistent=false, int num_threads=1) |
| Ensure work vectors long enough to evaluate function. More... | |
| void | setup (void *mem, const double **arg, double **res, casadi_int *iw, double *w) const |
| Set the (persistent and temporary) work vectors. More... | |
| virtual Dict | info () const |
| Function | map (casadi_int n, const std::string ¶llelization) const |
| Generate/retrieve cached serial map. More... | |
| void | generate_in (const std::string &fname, const double **arg) const |
| Export an input file that can be passed to generate C code with a main. More... | |
| void | generate_out (const std::string &fname, double **res) const |
| virtual void | merge (const std::vector< MX > &arg, std::vector< MX > &subs_from, std::vector< MX > &subs_to) const |
| List merge opportunitities. More... | |
| template<typename MatType > | |
| std::vector< std::vector< MatType > > | fwd_seed (casadi_int nfwd) const |
| Symbolic expressions for the forward seeds. More... | |
| template<typename MatType > | |
| std::vector< std::vector< MatType > > | symbolicAdjSeed (casadi_int nadj, const std::vector< MatType > &v) const |
| Symbolic expressions for the adjoint seeds. More... | |
| void | print_in (std::ostream &stream, const double **arg, bool truncate) const |
| Print inputs. More... | |
| void | print_out (std::ostream &stream, double **res, bool truncate) const |
| Print outputs. More... | |
| void | construct (const Dict &opts) |
| Construct. More... | |
| void | print_options (std::ostream &stream) const |
| Print list of options. More... | |
| void | print_option (const std::string &name, std::ostream &stream) const |
| Print all information there is to know about a certain option. More... | |
| bool | has_option (const std::string &option_name) const |
| Does a particular option exist. More... | |
| int | checkout () const |
| Checkout a memory object. More... | |
| void | release (int mem) const |
| Release a memory object. More... | |
| void * | memory (int ind) const |
| Memory objects. More... | |
| bool | has_memory (int ind) const |
| Check for existance of memory object. More... | |
| virtual void | check_mem_count (casadi_int n) const |
| Check for validatity of memory object count. More... | |
| void | clear_mem () |
| Clear all memory (called from destructor) More... | |
| void | print (const char *fmt,...) const |
| C-style formatted printing during evaluation. More... | |
| void | sprint (char *buf, size_t buf_sz, const char *fmt,...) const |
| C-style formatted printing to string. More... | |
| void | format_time (char *buffer, double time) const |
| Format time in a fixed width 8 format. More... | |
| void | print_time (const std::map< std::string, FStats > &fstats) const |
| Print timing statistics. More... | |
| void | serialize (SerializingStream &s) const |
| Serialize an object. More... | |
| casadi_int | getCount () const |
| Get the reference count. More... | |
| std::string | debug_repr (const SharedObjectInternal *) const |
| GenericWeakRef< SharedObject, SharedObjectInternal > * | weak () |
| Get a weak reference to the object. More... | |
| size_t | get_n_in () override |
| Number of function inputs and outputs. More... | |
| size_t | get_n_out () override |
| Number of function inputs and outputs. More... | |
| Sparsity | get_sparsity_in (casadi_int i) override |
| Sparsities of function inputs and outputs. More... | |
| Sparsity | get_sparsity_out (casadi_int i) override |
| Sparsities of function inputs and outputs. More... | |
| std::string | get_name_in (casadi_int i) override |
| Names of function input and outputs. More... | |
| std::string | get_name_out (casadi_int i) override |
| Names of function input and outputs. More... | |
| bool | has_forward (casadi_int nfwd) const override |
| Generate a function that calculates forward mode derivatives. More... | |
| Function | get_forward (casadi_int nfwd, const std::string &name, const std::vector< std::string > &inames, const std::vector< std::string > &onames, const Dict &opts) const override |
| Generate a function that calculates forward mode derivatives. More... | |
| bool | has_reverse (casadi_int nadj) const override |
| Generate a function that calculates reverse mode derivatives. More... | |
| Function | get_reverse (casadi_int nadj, const std::string &name, const std::vector< std::string > &inames, const std::vector< std::string > &onames, const Dict &opts) const override |
| Generate a function that calculates reverse mode derivatives. More... | |
| virtual bool | has_spfwd () const |
| Is the class able to propagate seeds through the algorithm? More... | |
| virtual bool | has_sprev () const |
| Is the class able to propagate seeds through the algorithm? More... | |
| int | eval_gen (const double **arg, double **res, casadi_int *iw, double *w, void *mem, bool always_inline, bool never_inline) const |
| Evaluate numerically. More... | |
| int | eval_gen (const SXElem **arg, SXElem **res, casadi_int *iw, SXElem *w, void *mem, bool always_inline, bool never_inline) const |
| Evaluate a function, overloaded. More... | |
| int | eval_gen (const bvec_t **arg, bvec_t **res, casadi_int *iw, bvec_t *w, void *mem, bool always_inline, bool never_inline) const |
| Evaluate a function, overloaded. More... | |
| virtual std::vector< DM > | eval_dm (const std::vector< DM > &arg) const |
| Evaluate with DM matrices. More... | |
| virtual bool | has_eval_dm () const |
| Evaluate with DM matrices. More... | |
| void | call_gen (const MXVector &arg, MXVector &res, casadi_int npar, bool always_inline, bool never_inline) const |
| Call a function, overloaded. More... | |
| template<typename D > | |
| void | call_gen (const std::vector< Matrix< D > > &arg, std::vector< Matrix< D > > &res, casadi_int npar, bool always_inline, bool never_inline) const |
| Call a function, overloaded. More... | |
| template<typename M > | |
| void | check_arg (const std::vector< M > &arg, casadi_int &npar) const |
| Check if input arguments have correct length and dimensions. More... | |
| template<typename M > | |
| void | check_res (const std::vector< M > &res, casadi_int &npar) const |
| Check if output arguments have correct length and dimensions. More... | |
| template<typename M > | |
| std::map< std::string, M > | convert_arg (const std::vector< M > &arg) const |
| Convert from/to input/output lists/map. More... | |
| template<typename M > | |
| std::vector< M > | convert_arg (const std::map< std::string, M > &arg) const |
| Convert from/to input/output lists/map. More... | |
| template<typename M > | |
| std::map< std::string, M > | convert_res (const std::vector< M > &res) const |
| Convert from/to input/output lists/map. More... | |
| template<typename M > | |
| std::vector< M > | convert_res (const std::map< std::string, M > &res) const |
| Convert from/to input/output lists/map. More... | |
| std::vector< double > | nz_in (const std::vector< DM > &arg) const |
| Convert from/to flat vector of input/output nonzeros. More... | |
| std::vector< DM > | nz_in (const std::vector< double > &arg) const |
| Convert from/to flat vector of input/output nonzeros. More... | |
| std::vector< double > | nz_out (const std::vector< DM > &res) const |
| Convert from/to flat vector of input/output nonzeros. More... | |
| std::vector< DM > | nz_out (const std::vector< double > &res) const |
| Convert from/to flat vector of input/output nonzeros. More... | |
| virtual void | call_forward (const std::vector< MX > &arg, const std::vector< MX > &res, const std::vector< std::vector< MX > > &fseed, std::vector< std::vector< MX > > &fsens, bool always_inline, bool never_inline) const |
| Forward mode AD, virtual functions overloaded in derived classes. More... | |
| virtual void | call_forward (const std::vector< SX > &arg, const std::vector< SX > &res, const std::vector< std::vector< SX > > &fseed, std::vector< std::vector< SX > > &fsens, bool always_inline, bool never_inline) const |
| Forward mode AD, virtual functions overloaded in derived classes. More... | |
| virtual void | call_reverse (const std::vector< MX > &arg, const std::vector< MX > &res, const std::vector< std::vector< MX > > &aseed, std::vector< std::vector< MX > > &asens, bool always_inline, bool never_inline) const |
| Reverse mode, virtual functions overloaded in derived classes. More... | |
| virtual void | call_reverse (const std::vector< SX > &arg, const std::vector< SX > &res, const std::vector< std::vector< SX > > &aseed, std::vector< std::vector< SX > > &asens, bool always_inline, bool never_inline) const |
| Reverse mode, virtual functions overloaded in derived classes. More... | |
| Function | jacobian () const |
| Return Jacobian of all input elements with respect to all output elements. More... | |
| virtual bool | has_jacobian () const |
| Return Jacobian of all input elements with respect to all output elements. More... | |
| virtual Function | get_jacobian (const std::string &name, const std::vector< std::string > &inames, const std::vector< std::string > &onames, const Dict &opts) const |
| Return Jacobian of all input elements with respect to all output elements. More... | |
| Sparsity & | jac_sparsity (casadi_int oind, casadi_int iind, bool compact, bool symmetric) const |
| Get Jacobian sparsity. More... | |
| virtual bool | has_jac_sparsity (casadi_int oind, casadi_int iind) const |
| Get Jacobian sparsity. More... | |
| virtual Sparsity | get_jac_sparsity (casadi_int oind, casadi_int iind, bool symmetric) const |
| Get Jacobian sparsity. More... | |
| Function | forward (casadi_int nfwd) const |
| Return function that calculates forward derivatives. More... | |
| Function | reverse (casadi_int nadj) const |
| Return function that calculates adjoint derivatives. More... | |
| virtual const SX | sx_in (casadi_int ind) const |
| Get function input(s) and output(s) More... | |
| virtual const std::vector< SX > | sx_in () const |
| Get function input(s) and output(s) More... | |
| virtual const SX | sx_out (casadi_int ind) const |
| Get function input(s) and output(s) More... | |
| virtual const std::vector< SX > | sx_out () const |
| Get function input(s) and output(s) More... | |
| virtual const MX | mx_in (casadi_int ind) const |
| Get function input(s) and output(s) More... | |
| virtual const std::vector< MX > | mx_in () const |
| Get function input(s) and output(s) More... | |
| virtual const MX | mx_out (casadi_int ind) const |
| Get function input(s) and output(s) More... | |
| virtual const std::vector< MX > | mx_out () const |
| Get function input(s) and output(s) More... | |
| const DM | dm_in (casadi_int ind) const |
| Get function input(s) and output(s) More... | |
| const std::vector< DM > | dm_in () const |
| Get function input(s) and output(s) More... | |
| const DM | dm_out (casadi_int ind) const |
| Get function input(s) and output(s) More... | |
| const std::vector< DM > | dm_out () const |
| Get function input(s) and output(s) More... | |
| casadi_int | nnz_in () const |
| Number of input/output nonzeros. More... | |
| casadi_int | nnz_in (casadi_int ind) const |
| Number of input/output nonzeros. More... | |
| casadi_int | nnz_out () const |
| Number of input/output nonzeros. More... | |
| casadi_int | nnz_out (casadi_int ind) const |
| Number of input/output nonzeros. More... | |
| casadi_int | numel_in () const |
| Number of input/output elements. More... | |
| casadi_int | numel_in (casadi_int ind) const |
| Number of input/output elements. More... | |
| casadi_int | numel_out (casadi_int ind) const |
| Number of input/output elements. More... | |
| casadi_int | numel_out () const |
| Number of input/output elements. More... | |
| casadi_int | size1_in (casadi_int ind) const |
| Input/output dimensions. More... | |
| casadi_int | size2_in (casadi_int ind) const |
| Input/output dimensions. More... | |
| casadi_int | size1_out (casadi_int ind) const |
| Input/output dimensions. More... | |
| casadi_int | size2_out (casadi_int ind) const |
| Input/output dimensions. More... | |
| std::pair< casadi_int, casadi_int > | size_in (casadi_int ind) const |
| Input/output dimensions. More... | |
| std::pair< casadi_int, casadi_int > | size_out (casadi_int ind) const |
| Input/output dimensions. More... | |
| const Sparsity & | sparsity_in (casadi_int ind) const |
| Input/output sparsity. More... | |
| const Sparsity & | sparsity_out (casadi_int ind) const |
| Input/output sparsity. More... | |
| bool | all_scalar () const |
| Are all inputs and outputs scalar. More... | |
| virtual bool | jac_is_symm (casadi_int oind, casadi_int iind) const |
| Is a Jacobian block known to be symmetric a priori? More... | |
| Sparsity | to_compact (casadi_int oind, casadi_int iind, const Sparsity &sp) const |
| Convert to compact Jacobian sparsity pattern. More... | |
| Sparsity | from_compact (casadi_int oind, casadi_int iind, const Sparsity &sp) const |
| Convert from compact Jacobian sparsity pattern. More... | |
| template<bool fwd> | |
| Sparsity | get_jac_sparsity_gen (casadi_int oind, casadi_int iind) const |
| Get the sparsity pattern via sparsity seed propagation. More... | |
| Sparsity | get_jac_sparsity_hierarchical (casadi_int oind, casadi_int iind) const |
| A flavor of get_jac_sparsity_gen that does hierarchical block structure recognition. More... | |
| Sparsity | get_jac_sparsity_hierarchical_symm (casadi_int oind, casadi_int iind) const |
| virtual std::vector< MX > | symbolic_output (const std::vector< MX > &arg) const |
| Get a vector of symbolic variables corresponding to the outputs. More... | |
| virtual size_t | codegen_sz_arg (const CodeGenerator &g) const |
| Get required lengths, for codegen. More... | |
| virtual size_t | codegen_sz_res (const CodeGenerator &g) const |
| Get required lengths, for codegen. More... | |
| virtual size_t | codegen_sz_iw (const CodeGenerator &g) const |
| Get required lengths, for codegen. More... | |
| virtual size_t | codegen_sz_w (const CodeGenerator &g) const |
| Get required lengths, for codegen. More... | |
| virtual bool | fwdViaJac (casadi_int nfwd) const |
| Calculate derivatives by multiplying the full Jacobian and multiplying. More... | |
| virtual bool | adjViaJac (casadi_int nadj) const |
| Calculate derivatives by multiplying the full Jacobian and multiplying. More... | |
Static Public Member Functions | |
| static Nlpsol * | creator (const std::string &name, const Function &nlp) |
| Create a new NLP Solver. More... | |
| static ProtoFunction * | deserialize (DeserializingStream &s) |
| Deserialize into MX. More... | |
| static void | bound_consistency (casadi_int n, double *z, double *lam, const double *lbz, const double *ubz) |
| static std::string | shortname () |
| Short name. More... | |
| template<typename Type > | |
| static void | append_to_vec (GenericType &t, Type el) |
| WORKAROUND: Add an element to an std::vector stored in a GenericType: More... | |
| template<typename XType > | |
| static Function | create_oracle (const std::map< std::string, XType > &d, const Dict &opts) |
| Convert dictionary to Problem. More... | |
| static std::string | forward_name (const std::string &fcn, casadi_int nfwd) |
| Helper function: Get name of forward derivative function. More... | |
| static std::string | reverse_name (const std::string &fcn, casadi_int nadj) |
| Helper function: Get name of adjoint derivative function. More... | |
| template<typename MatType > | |
| static MatType | ensure_stacked (const MatType &v, const Sparsity &sp, casadi_int n) |
| Ensure that a matrix's sparsity is a horizontal multiple of another, or empty. More... | |
| template<typename MatType > | |
| static bool | purgable (const std::vector< MatType > &seed) |
| Can a derivative direction be skipped. More... | |
| static std::string | string_from_UnifiedReturnStatus (UnifiedReturnStatus status) |
| static void | print_canonical (std::ostream &stream, const Sparsity &sp, const double *nz) |
| Print canonical representation of a numeric matrix. More... | |
| static void | print_canonical (std::ostream &stream, casadi_int sz, const double *nz) |
| Print canonical representation of a numeric vector. More... | |
| static void | print_canonical (std::ostream &stream, double a) |
| Print canonical representation of a number. More... | |
| static bool | has_plugin (const std::string &pname, bool verbose=false) |
| Check if a plugin is available or can be loaded. More... | |
| static const Options & | plugin_options (const std::string &pname) |
| Get the plugin options. More... | |
| static Deserialize | plugin_deserialize (const std::string &pname) |
| Get the plugin deserialize_map. More... | |
| static Plugin | pluginFromRegFcn (RegFcn regfcn) |
| Instantiate a Plugin struct from a factory function. More... | |
| static Plugin | load_plugin (const std::string &pname, bool register_plugin=true, bool needs_lock=true) |
| Load a plugin dynamically. More... | |
| static handle_t | load_library (const std::string &libname, std::string &resultpath, bool global) |
| Load a library dynamically. More... | |
| static void | registerPlugin (const Plugin &plugin, bool needs_lock=true) |
| Register an integrator in the factory. More... | |
| static void | registerPlugin (RegFcn regfcn, bool needs_lock=true) |
| Register an integrator in the factory. More... | |
| static Plugin & | getPlugin (const std::string &pname) |
| Load and get the creator function. More... | |
| static Nlpsol * | instantiate (const std::string &fname, const std::string &pname, Problem problem) |
| static bool | check_mat (const Sparsity &arg, const Sparsity &inp, casadi_int &npar) |
Public Attributes | |
| casadi_int | nblocks_ |
| std::vector< casadi_int > | blocks_ |
| std::vector< casadi_int > | dim_ |
| casadi_int | nnz_H_ |
| Sparsity | Asp_ |
| Sparsity | Hsp_ |
| Sparsity | exact_hess_lag_sp_ |
| std::string | linsol_plugin_ |
| QP solver for the subproblems. More... | |
| bool | print_header_ |
| bool | print_iteration_ |
| double | eps_ |
| double | opttol_ |
| double | nlinfeastol_ |
| bool | schur_ |
| bool | globalization_ |
| bool | restore_feas_ |
| casadi_int | max_line_search_ |
| casadi_int | max_consec_reduced_steps_ |
| casadi_int | max_consec_skipped_updates_ |
| casadi_int | max_it_qp_ |
| casadi_int | max_iter_ |
| bool | warmstart_ |
| bool | qp_init_ |
| bool | block_hess_ |
| casadi_int | hess_scaling_ |
| casadi_int | fallback_scaling_ |
| double | max_time_qp_ |
| double | ini_hess_diag_ |
| double | col_eps_ |
| double | col_tau1_ |
| double | col_tau2_ |
| casadi_int | hess_damp_ |
| double | hess_damp_fac_ |
| casadi_int | hess_update_ |
| casadi_int | fallback_update_ |
| casadi_int | hess_lim_mem_ |
| casadi_int | hess_memsize_ |
| casadi_int | which_second_derv_ |
| bool | skip_first_globalization_ |
| casadi_int | conv_strategy_ |
| casadi_int | max_conv_qp_ |
| casadi_int | max_soc_iter_ |
| double | gamma_theta_ |
| double | gamma_f_ |
| double | kappa_soc_ |
| double | kappa_f_ |
| double | theta_max_ |
| double | theta_min_ |
| double | delta_ |
| double | s_theta_ |
| double | s_f_ |
| double | kappa_minus_ |
| double | kappa_plus_ |
| double | kappa_plus_max_ |
| double | delta_h0_ |
| double | eta_ |
| double | obj_lo_ |
| double | obj_up_ |
| double | rho_ |
| double | zeta_ |
| Function | rp_solver_ |
| bool | print_maxit_reached_ |
| casadi_nlpsol_prob< double > | p_nlp_ |
| casadi_int | nx_ |
| Number of variables. More... | |
| casadi_int | ng_ |
| Number of constraints. More... | |
| casadi_int | np_ |
| Number of parameters. More... | |
| Function | fcallback_ |
| callback function, executed at each iteration More... | |
| casadi_int | callback_step_ |
| Execute the callback function only after this amount of iterations. More... | |
| std::string | sens_linsol_ |
| Linear solver and options. More... | |
| Dict | sens_linsol_options_ |
| std::vector< char > | detect_simple_bounds_is_simple_ |
| Function | detect_simple_bounds_parts_ |
| std::vector< casadi_int > | detect_simple_bounds_target_x_ |
| std::vector< casadi_int > | detect_simple_bounds_target_g_ |
| bool | mi_ |
| WeakRef | kkt_ |
| Cache for KKT function. More... | |
| bool | always_inline_ |
| bool | never_inline_ |
| size_t | n_in_ |
| Number of inputs and outputs. More... | |
| size_t | n_out_ |
| std::vector< bool > | is_diff_in_ |
| Are inputs and outputs differentiable? More... | |
| std::vector< bool > | is_diff_out_ |
| std::vector< Sparsity > | sparsity_in_ |
| Input and output sparsity. More... | |
| std::vector< Sparsity > | sparsity_out_ |
| std::vector< std::string > | name_in_ |
| Input and output scheme. More... | |
| std::vector< std::string > | name_out_ |
| bool | jit_ |
| Use just-in-time compiler. More... | |
| bool | jit_cleanup_ |
| Cleanup jit source file. More... | |
| std::string | jit_serialize_ |
| Serialize behaviour. More... | |
| std::string | jit_name_ |
| Name if jit source file. More... | |
| std::string | jit_base_name_ |
| bool | jit_temp_suffix_ |
| Use a temporary name. More... | |
| eval_t | eval_ |
| Numerical evaluation redirected to a C function. More... | |
| casadi_checkout_t | checkout_ |
| Checkout redirected to a C function. More... | |
| casadi_release_t | release_ |
| Release redirected to a C function. More... | |
| Dict | stats_ |
| Dict of statistics (resulting from evaluate) More... | |
| bool | has_refcount_ |
| Reference counting in codegen? More... | |
| Dict | cache_init_ |
| Values to prepopulate the function cache with. More... | |
| WeakCache< std::string, Function > | cache_ |
| Function cache. More... | |
| std::vector< Sparsity > | jac_sparsity_ [2] |
| Cache for sparsities of the Jacobian blocks. More... | |
| Function | derivative_of_ |
| If the function is the derivative of another function. More... | |
| void * | user_data_ |
| User-set field. More... | |
| std::string | compiler_plugin_ |
| Just-in-time compiler. More... | |
| Importer | compiler_ |
| Dict | jit_options_ |
| double | jac_penalty_ |
| Penalty factor for using a complete Jacobian to calculate directional derivatives. More... | |
| bool | enable_forward_ |
| bool | enable_reverse_ |
| bool | enable_jacobian_ |
| bool | enable_fd_ |
| bool | enable_forward_op_ |
| bool | enable_reverse_op_ |
| bool | enable_jacobian_op_ |
| bool | enable_fd_op_ |
| double | ad_weight_ |
| Weighting factor for derivative calculation and sparsity pattern calculation. More... | |
| double | ad_weight_sp_ |
| casadi_int | max_num_dir_ |
| Maximum number of sensitivity directions. More... | |
| bool | inputs_check_ |
| Errors are thrown if numerical values of inputs look bad. More... | |
| Dict | fd_options_ |
| double | fd_step_ |
| std::string | fd_method_ |
| bool | print_in_ |
| bool | print_out_ |
| bool | print_canonical_ |
| casadi_int | max_io_ |
| bool | dump_in_ |
| bool | dump_out_ |
| bool | dump_ |
| std::string | dump_dir_ |
| std::string | dump_format_ |
| Dict | forward_options_ |
| Dict | reverse_options_ |
| Dict | jacobian_options_ |
| Dict | der_options_ |
| Function | custom_jacobian_ |
| casadi_int | dump_count_ |
| std::string | name_ |
| Name. More... | |
| bool | verbose_ |
| Verbose printout. More... | |
| bool | print_time_ |
| bool | record_time_ |
| bool | regularity_check_ |
| Errors are thrown when NaN is produced. More... | |
| bool | error_on_fail_ |
| Throw an exception on failure? More... | |
| bool | eval_errors_fatal_ |
| Options. More... | |
| bool | warn_initial_bounds_ |
| Options. More... | |
| bool | iteration_callback_ignore_errors_ |
| Options. More... | |
| bool | calc_multipliers_ |
| Options. More... | |
| bool | calc_lam_x_ |
| Options. More... | |
| bool | calc_lam_p_ |
| Options. More... | |
| bool | calc_f_ |
| Options. More... | |
| bool | calc_g_ |
| Options. More... | |
| bool | bound_consistency_ |
| Options. More... | |
| double | min_lam_ |
| Options. More... | |
| bool | no_nlp_grad_ |
| Options. More... | |
| std::vector< bool > | discrete_ |
| Options. More... | |
| std::vector< bool > | equality_ |
| Options. More... | |
Static Public Attributes | |
| static const std::string | meta_doc |
| A documentation string. More... | |
| static std::map< std::string, Plugin > | solvers_ |
| Collection of solvers. More... | |
| static const std::string | infix_ = "nlpsol" |
| Infix. More... | |
| static std::map< std::string, ProtoFunction *(*)(DeserializingStream &)> | deserialize_map |
Protected Member Functions | |
| Blocksqp (DeserializingStream &s) | |
| Deserializing constructor. More... | |
| void | set_jac_sparsity (casadi_int oind, casadi_int iind, const Sparsity &sp) |
| Populate jac_sparsity_ and jac_sparsity_compact_ during initialization. More... | |
| void | initSingleton () |
| void | destroySingleton () |
| B | shared_from_this () |
| Get a shared object from the current internal object. More... | |
| const B | shared_from_this () const |
| Get a shared object from the current internal object. More... | |
Protected Attributes | |
| Function | oracle_ |
| Oracle: Used to generate other functions. More... | |
| Dict | common_options_ |
| Options for creating functions. More... | |
| Dict | specific_options_ |
| bool | show_eval_warnings_ |
| Show evaluation warnings. More... | |
| int | max_num_threads_ |
| std::map< std::string, RegFun > | all_functions_ |
| std::vector< std::string > | monitor_ |
| size_t | stride_arg_ |
| size_t | stride_res_ |
| size_t | stride_iw_ |
| size_t | stride_w_ |
| bool | post_expand_ |
| static const Options | options_ |
| Options. More... | |
| const Options & | get_options () const override |
| Options. More... | |
|
inherited |
Definition at line 277 of file nlpsol_impl.hpp.
|
inherited |
Definition at line 73 of file plugin_interface.hpp.
|
inherited |
Definition at line 152 of file shared_object.hpp.
|
explicit |
Definition at line 49 of file blocksqp.cpp.
|
override |
Definition at line 54 of file blocksqp.cpp.
References casadi::ProtoFunction::clear_mem().
|
explicitprotected |
Definition at line 2848 of file blocksqp.cpp.
References Asp_, block_hess_, blocks_, col_eps_, col_tau1_, col_tau2_, conv_strategy_, delta_, delta_h0_, dim_, eps_, eta_, exact_hess_lag_sp_, fallback_scaling_, fallback_update_, gamma_f_, gamma_theta_, globalization_, hess_damp_, hess_damp_fac_, hess_lim_mem_, hess_memsize_, hess_scaling_, hess_update_, Hsp_, ini_hess_diag_, kappa_f_, kappa_minus_, kappa_plus_, kappa_plus_max_, kappa_soc_, linsol_plugin_, max_consec_reduced_steps_, max_consec_skipped_updates_, max_conv_qp_, max_it_qp_, max_iter_, max_line_search_, max_soc_iter_, max_time_qp_, nblocks_, nlinfeastol_, nnz_H_, obj_lo_, obj_up_, opttol_, print_header_, print_iteration_, print_maxit_reached_, qp_init_, restore_feas_, rho_, rp_solver_, s_f_, s_theta_, schur_, skip_first_globalization_, theta_max_, theta_min_, casadi::DeserializingStream::unpack(), casadi::DeserializingStream::version(), warmstart_, which_second_derv_, and zeta_.
| void casadi::Blocksqp::acceptStep | ( | BlocksqpMemory * | m, |
| const double * | deltaXi, | ||
| const double * | lambdaQP, | ||
| double | alpha, | ||
| casadi_int | nSOCS | ||
| ) | const |
Definition at line 1107 of file blocksqp.cpp.
References casadi::BlocksqpMemory::alpha, casadi::NlpsolMemory::d_nlp, casadi::BlocksqpMemory::dxk, casadi::BlocksqpMemory::lam_gk, casadi::BlocksqpMemory::lam_xk, casadi::BlocksqpMemory::lambdaStepNorm, casadi::Nlpsol::ng_, casadi::BlocksqpMemory::nSOCS, casadi::Nlpsol::nx_, casadi::BlocksqpMemory::reducedStepCount, and casadi::BlocksqpMemory::trial_xk.
Referenced by acceptStep(), filterLineSearch(), fullstep(), kktErrorReduction(), and secondOrderCorrection().
| void casadi::Blocksqp::acceptStep | ( | BlocksqpMemory * | m, |
| double | alpha | ||
| ) | const |
Definition at line 1102 of file blocksqp.cpp.
References acceptStep(), casadi::BlocksqpMemory::dxk, and casadi::BlocksqpMemory::lam_qp.
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_l5
Definition at line 3274 of file function_internal.cpp.
References casadi::FunctionInternal::ad_weight_, casadi::FunctionInternal::enable_fd_, casadi::FunctionInternal::enable_forward_, and casadi::FunctionInternal::enable_reverse_.
Referenced by casadi::FunctionInternal::adjViaJac(), casadi::Function::expand(), casadi::FunctionInternal::fwdViaJac(), casadi::FunctionInternal::get_partition(), casadi::FunctionInternal::wrap(), and casadi::FunctionInternal::wrap_as_needed().
|
inherited |
Definition at line 3717 of file function_internal.cpp.
References casadi::FunctionInternal::find(), casadi::Function::get(), and casadi::GenericShared< Shared, Internal >::is_null().
Referenced by casadi::MXFunction::find(), casadi::Switch::find(), casadi::SXFunction::find(), and casadi::BSplineInterpolant::find().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_nc
Definition at line 3009 of file function_internal.cpp.
References casadi::FunctionInternal::ad_weight(), casadi::FunctionInternal::enable_fd_, casadi::FunctionInternal::enable_forward_, casadi::FunctionInternal::enable_reverse_, casadi::FunctionInternal::jac_penalty_, casadi::FunctionInternal::nnz_in(), and casadi::FunctionInternal::nnz_out().
Referenced by casadi::FunctionInternal::call_reverse().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_mi
Definition at line 3748 of file function_internal.cpp.
References casadi::FunctionInternal::n_in_, casadi::FunctionInternal::n_out_, casadi::FunctionInternal::sparsity_in_, and casadi::FunctionInternal::sparsity_out_.
Referenced by casadi::FunctionInternal::call().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_n8
Definition at line 2958 of file function_internal.cpp.
References casadi::FunctionInternal::alloc_arg(), casadi::FunctionInternal::alloc_iw(), casadi::FunctionInternal::alloc_res(), casadi::FunctionInternal::alloc_w(), casadi::GenericShared< Shared, Internal >::is_null(), casadi::FunctionInternal::sz_arg(), casadi::FunctionInternal::sz_iw(), casadi::FunctionInternal::sz_res(), casadi::FunctionInternal::sz_w(), and casadi::Function::sz_work().
Referenced by casadi::OracleFunction::finalize(), casadi::KinsolInterface::get_jtimes(), casadi::FiniteDiff::init(), casadi::Nlpsol::init(), casadi::Rootfinder::init(), casadi::Switch::init(), casadi::Feasiblesqpmethod::init(), casadi::ImplicitToNlp::init(), casadi::QpToNlp::init(), casadi::Qrsqp::init(), casadi::Scpgen::init(), and casadi::Sqpmethod::init().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_n4
Definition at line 2926 of file function_internal.cpp.
References casadi::FunctionInternal::sz_arg().
Referenced by casadi::FunctionInternal::alloc(), casadi::External::init(), casadi::FunctionInternal::init(), casadi::Map::init(), casadi::OmpMap::init(), casadi::ThreadMap::init(), casadi::MapSum::init(), casadi::MXFunction::init(), casadi::Nlpsol::init(), casadi::SXFunction::init(), casadi::ClarabelInterface::init(), casadi::DaqpInterface::init(), casadi::FatropConicInterface::init(), casadi::FatropInterface::init(), casadi::HighsInterface::init(), casadi::HpipmInterface::init(), casadi::MadnlpInterface::init(), casadi::BSplineInterpolant::init(), and casadi::Qrqp::init().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_n6
Definition at line 2942 of file function_internal.cpp.
References casadi::FunctionInternal::sz_iw().
Referenced by casadi::FunctionInternal::alloc(), casadi::BlazingSplineFunction::init(), casadi::External::init(), casadi::FmuFunction::init(), casadi::Integrator::init(), casadi::Interpolant::init(), casadi::Map::init(), casadi::OmpMap::init(), casadi::ThreadMap::init(), casadi::MapSum::init(), casadi::MXFunction::init(), casadi::Nlpsol::init(), casadi::SXFunction::init(), init(), casadi::ClarabelInterface::init(), casadi::DaqpInterface::init(), casadi::FatropConicInterface::init(), casadi::FatropInterface::init(), casadi::GurobiInterface::init(), casadi::HighsInterface::init(), casadi::HpipmInterface::init(), casadi::IpoptInterface::init(), casadi::MadnlpInterface::init(), casadi::OoqpInterface::init(), casadi::SlicotDple::init(), casadi::SlicotExpm::init(), casadi::SundialsInterface::init(), casadi::BSplineInterpolant::init(), casadi::Feasiblesqpmethod::init(), casadi::Ipqp::init(), casadi::LinearInterpolant::init(), casadi::LinearInterpolantJac::init(), casadi::Qrqp::init(), and casadi::Sqpmethod::init().
|
inlineoverridevirtual |
Reimplemented from casadi::Nlpsol.
Definition at line 177 of file blocksqp.hpp.
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_n5
Definition at line 2934 of file function_internal.cpp.
References casadi::FunctionInternal::sz_res().
Referenced by casadi::FunctionInternal::alloc(), casadi::External::init(), casadi::FiniteDiff::init(), casadi::FunctionInternal::init(), casadi::Map::init(), casadi::OmpMap::init(), casadi::ThreadMap::init(), casadi::MapSum::init(), casadi::MXFunction::init(), casadi::Nlpsol::init(), casadi::SXFunction::init(), init(), casadi::ClarabelInterface::init(), casadi::DaqpInterface::init(), casadi::FatropConicInterface::init(), casadi::FatropInterface::init(), casadi::HighsInterface::init(), casadi::HpipmInterface::init(), casadi::MadnlpInterface::init(), casadi::BSplineInterpolant::init(), and casadi::Qrqp::init().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_n7
Definition at line 2950 of file function_internal.cpp.
References casadi::FunctionInternal::sz_w().
Referenced by casadi::FunctionInternal::alloc(), casadi::BlazingSplineFunction::init(), casadi::External::init(), casadi::FiniteDiff::init(), casadi::FmuFunction::init(), casadi::Integrator::init(), casadi::FixedStepIntegrator::init(), casadi::Interpolant::init(), casadi::JitFunction::init(), casadi::Map::init(), casadi::OmpMap::init(), casadi::ThreadMap::init(), casadi::MapSum::init(), casadi::MXFunction::init(), casadi::Nlpsol::init(), casadi::Rootfinder::init(), casadi::Switch::init(), casadi::SXFunction::init(), init(), casadi::BonminInterface::init(), casadi::CbcInterface::init(), casadi::ClarabelInterface::init(), casadi::ClpInterface::init(), casadi::CplexInterface::init(), casadi::DaqpInterface::init(), casadi::FatropConicInterface::init(), casadi::FatropInterface::init(), casadi::GurobiInterface::init(), casadi::HighsInterface::init(), casadi::HpipmInterface::init(), casadi::IpoptInterface::init(), casadi::KnitroInterface::init(), casadi::MadnlpInterface::init(), casadi::OoqpInterface::init(), casadi::OsqpInterface::init(), casadi::ProxqpInterface::init(), casadi::QpoasesInterface::init(), casadi::SLEQPInterface::init(), casadi::SlicotDple::init(), casadi::SlicotExpm::init(), casadi::SnoptInterface::init(), casadi::CvodesInterface::init(), casadi::IdasInterface::init(), casadi::KinsolInterface::init(), casadi::SundialsInterface::init(), casadi::SuperscsInterface::init(), casadi::WorhpInterface::init(), casadi::BSplineInterpolant::init(), casadi::FastNewton::init(), casadi::Feasiblesqpmethod::init(), casadi::ImplicitToNlp::init(), casadi::Ipqp::init(), casadi::LinearInterpolant::init(), casadi::LinearInterpolantJac::init(), casadi::Newton::init(), casadi::QpToNlp::init(), casadi::Qrqp::init(), casadi::Qrsqp::init(), casadi::Scpgen::init(), and casadi::Sqpmethod::init().
|
inlinestaticinherited |
Definition at line 312 of file nlpsol_impl.hpp.
| void casadi::Blocksqp::augmentFilter | ( | BlocksqpMemory * | m, |
| double | cNorm, | ||
| double | obj | ||
| ) | const |
Augment the filter: F_k+1 = F_k U { (c,f) | c > (1-gammaTheta)cNorm and f > obj-gammaF*c
Definition at line 1741 of file blocksqp.cpp.
References casadi::BlocksqpMemory::filter, gamma_f_, and gamma_theta_.
Referenced by filterLineSearch().
|
staticinherited |
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_26g
Definition at line 1054 of file function_internal.cpp.
References casadi::FunctionInternal::cache_.
|
inherited |
Definition at line 302 of file oracle_function.cpp.
References casadi::InterruptHandler::check(), casadi::OracleFunction::get_function(), casadi::OracleFunction::max_num_threads_, casadi::OracleFunction::monitored(), casadi::Function::n_in(), casadi::Function::n_out(), casadi::ProtoFunction::name_, casadi::Function::name_in(), casadi::Function::name_out(), casadi::Function::nnz_in(), casadi::Function::nnz_out(), casadi::Matrix< double >::print_scalar(), casadi::ProtoFunction::regularity_check_, casadi::Sparsity::repr_el(), casadi::OracleFunction::show_eval_warnings_, casadi::Function::sparsity_out(), and casadi::OracleMemory::thread_local_mem.
Referenced by casadi::KinsolInterface::bjac(), casadi::SundialsInterface::calc_daeB(), casadi::SundialsInterface::calc_daeF(), casadi::Integrator::calc_edot(), casadi::calc_function(), casadi::SundialsInterface::calc_jacF(), casadi::SundialsInterface::calc_jtimesF(), casadi::SundialsInterface::calc_quadB(), casadi::SundialsInterface::calc_quadF(), casadi::casadi_func_cons_jac(), casadi::casadi_func_cons_val(), casadi::casadi_func_hess_prod(), casadi::casadi_func_obj_grad(), casadi::casadi_func_obj_val(), casadi::KinsolInterface::djac(), casadi::Nlpsol::eval(), casadi::AlpaqaProblem::eval_f(), casadi::BonminUserClass::eval_f(), casadi::IpoptUserClass::eval_f(), casadi::AlpaqaProblem::eval_f_grad_f(), casadi::AlpaqaProblem::eval_g(), casadi::BonminUserClass::eval_g(), casadi::IpoptUserClass::eval_g(), casadi::BonminUserClass::eval_grad_f(), casadi::IpoptUserClass::eval_grad_f(), casadi::AlpaqaProblem::eval_grad_L(), casadi::BonminUserClass::eval_h(), casadi::IpoptUserClass::eval_h(), casadi::AlpaqaProblem::eval_hess_L(), casadi::AlpaqaProblem::eval_hess_L_prod(), casadi::AlpaqaProblem::eval_hess_ψ(), casadi::AlpaqaProblem::eval_hess_ψ_prod(), casadi::AlpaqaProblem::eval_jac_g(), casadi::BonminUserClass::eval_jac_g(), casadi::IpoptUserClass::eval_jac_g(), casadi::AlpaqaProblem::eval_ψ(), casadi::AlpaqaProblem::eval_ψ_grad_ψ(), evaluate(), casadi::Feasiblesqpmethod::feasibility_iterations(), casadi::KinsolInterface::psetup(), casadi::KnitroInterface::solve(), casadi::SnoptInterface::solve(), casadi::WorhpInterface::solve(), casadi::Feasiblesqpmethod::solve(), casadi::Newton::solve(), casadi::Qrsqp::solve(), casadi::Sqpmethod::solve(), casadi::FixedStepIntegrator::stepB(), casadi::FixedStepIntegrator::stepF(), casadi::Integrator::trigger_event(), and casadi::SnoptInterface::userfun().
|
inherited |
Definition at line 418 of file oracle_function.cpp.
References casadi::OracleFunction::get_function().
Referenced by casadi::Integrator::bdae_sp_forward(), casadi::Integrator::bquad_sp_forward(), casadi::Integrator::fdae_sp_forward(), and casadi::Integrator::fquad_sp_forward().
|
inherited |
Definition at line 423 of file oracle_function.cpp.
References casadi::OracleFunction::get_function().
Referenced by casadi::Integrator::bdae_sp_reverse(), casadi::Integrator::bquad_sp_reverse(), casadi::Integrator::fdae_sp_reverse(), and casadi::Integrator::fquad_sp_reverse().
| void casadi::Blocksqp::calcBFGS | ( | BlocksqpMemory * | m, |
| const double * | gamma, | ||
| const double * | delta, | ||
| casadi_int | b | ||
| ) | const |
Definition at line 2133 of file blocksqp.cpp.
References casadi::BlocksqpMemory::delta_gamma, dim_, eps_, casadi::BlocksqpMemory::hess, hess_damp_, hess_damp_fac_, casadi::BlocksqpMemory::hessDamped, casadi::BlocksqpMemory::hessSkipped, casadi::BlocksqpMemory::noUpdateCounter, and casadi::BlocksqpMemory::nTotalSkippedUpdates.
Referenced by calcHessianUpdate(), and calcHessianUpdateLimitedMemory().
| void casadi::Blocksqp::calcHessianUpdate | ( | BlocksqpMemory * | m, |
| casadi_int | updateType, | ||
| casadi_int | hessScaling | ||
| ) | const |
Apply BFGS or SR1 update blockwise and size blocks
Definition at line 1923 of file blocksqp.cpp.
References casadi::BlocksqpMemory::averageSizingFactor, block_hess_, blocks_, calcBFGS(), calcSR1(), casadi::casadi_dot(), casadi::BlocksqpMemory::delta_gamma, casadi::BlocksqpMemory::delta_gamma_old, casadi::BlocksqpMemory::delta_norm, casadi::BlocksqpMemory::delta_norm_old, casadi::BlocksqpMemory::deltaMat, dim_, fallback_scaling_, fallback_update_, casadi::BlocksqpMemory::gammaMat, casadi::BlocksqpMemory::hess, casadi::BlocksqpMemory::hess1, casadi::BlocksqpMemory::hess2, casadi::BlocksqpMemory::hessDamped, max_consec_skipped_updates_, nblocks_, casadi::BlocksqpMemory::noUpdateCounter, resetHessian(), sizeHessianCOL(), sizeInitialHessian(), and which_second_derv_.
Referenced by calcHessianUpdateExact(), and run().
| void casadi::Blocksqp::calcHessianUpdateExact | ( | BlocksqpMemory * | m | ) | const |
Definition at line 2096 of file blocksqp.cpp.
References blocks_, calcHessianUpdate(), calcInitialHessian(), casadi::Sparsity::colind(), dim_, evaluate(), casadi::BlocksqpMemory::exact_hess_lag, exact_hess_lag_sp_, fallback_scaling_, fallback_update_, casadi::BlocksqpMemory::hess, casadi::BlocksqpMemory::hess1, casadi::BlocksqpMemory::hess2, hess_lim_mem_, nblocks_, and casadi::Sparsity::row().
Referenced by run().
| void casadi::Blocksqp::calcHessianUpdateLimitedMemory | ( | BlocksqpMemory * | m, |
| casadi_int | updateType, | ||
| casadi_int | hessScaling | ||
| ) | const |
Definition at line 1995 of file blocksqp.cpp.
References casadi::BlocksqpMemory::averageSizingFactor, block_hess_, blocks_, calcBFGS(), calcInitialHessian(), calcSR1(), casadi::casadi_dot(), casadi::BlocksqpMemory::delta_gamma, casadi::BlocksqpMemory::delta_gamma_old, casadi::BlocksqpMemory::delta_norm, casadi::BlocksqpMemory::delta_norm_old, casadi::BlocksqpMemory::deltaMat, dim_, casadi::BlocksqpMemory::gammaMat, hess_memsize_, casadi::BlocksqpMemory::hessDamped, casadi::BlocksqpMemory::hessSkipped, casadi::BlocksqpMemory::itCount, max_consec_skipped_updates_, nblocks_, casadi::BlocksqpMemory::noUpdateCounter, casadi::BlocksqpMemory::nTotalUpdates, casadi::Nlpsol::nx_, resetHessian(), sizeHessianCOL(), sizeInitialHessian(), and which_second_derv_.
Referenced by computeNextHessian(), and run().
| void casadi::Blocksqp::calcInitialHessian | ( | BlocksqpMemory * | m | ) | const |
Initial Hessian: Identity matrix
Definition at line 1765 of file blocksqp.cpp.
References block_hess_, nblocks_, and which_second_derv_.
Referenced by calcHessianUpdateExact(), calcHessianUpdateLimitedMemory(), resetHessian(), and run().
| void casadi::Blocksqp::calcInitialHessian | ( | BlocksqpMemory * | m, |
| casadi_int | b | ||
| ) | const |
Initial Hessian for one block: Identity matrix
Definition at line 1777 of file blocksqp.cpp.
References casadi::casadi_fill(), dim_, casadi::BlocksqpMemory::hess, casadi::BlocksqpMemory::hess2, and ini_hess_diag_.
| void casadi::Blocksqp::calcLagrangeGradient | ( | BlocksqpMemory * | m, |
| const double * | lam_x, | ||
| const double * | lam_g, | ||
| const double * | grad_f, | ||
| const double * | jacNz, | ||
| double * | grad_lag, | ||
| casadi_int | flag | ||
| ) | const |
Compute gradient of Lagrangian or difference of Lagrangian gradients (sparse version)
flag == 0: output dL(xk, lambda) flag == 1: output dL(xi_k+1, lambda_k+1) - L(xi_k, lambda_k+1) flag == 2: output dL(xi_k+1, lambda_k+1) - df(xi)
Definition at line 952 of file blocksqp.cpp.
References Asp_, casadi::casadi_axpy(), casadi::casadi_copy(), casadi::casadi_fill(), casadi::casadi_scal(), casadi::Sparsity::colind(), casadi::Nlpsol::nx_, and casadi::Sparsity::row().
Referenced by calcLagrangeGradient(), calcOptTol(), kktErrorReduction(), and run().
| void casadi::Blocksqp::calcLagrangeGradient | ( | BlocksqpMemory * | m, |
| double * | grad_lag, | ||
| casadi_int | flag | ||
| ) | const |
Wrapper if called with standard arguments
Definition at line 984 of file blocksqp.cpp.
References calcLagrangeGradient(), casadi::BlocksqpMemory::grad_fk, casadi::BlocksqpMemory::jac_g, casadi::BlocksqpMemory::lam_gk, and casadi::BlocksqpMemory::lam_xk.
| bool casadi::Blocksqp::calcOptTol | ( | BlocksqpMemory * | m | ) | const |
Compute optimality conditions: ||grad_lag(xk,lambda)||_infty / (1 + ||lambda||_infty) <= TOL and ||constrViolation||_infty / (1 + ||xi||_infty) <= TOL
Definition at line 997 of file blocksqp.cpp.
References calcLagrangeGradient(), casadi::casadi_norm_inf(), casadi::BlocksqpMemory::cNorm, casadi::BlocksqpMemory::cNormS, casadi::NlpsolMemory::d_nlp, casadi::BlocksqpMemory::gk, casadi::BlocksqpMemory::grad_lagk, casadi::BlocksqpMemory::gradNorm, casadi::BlocksqpMemory::lam_gk, casadi::BlocksqpMemory::lam_xk, lInfConstraintNorm(), casadi::Nlpsol::ng_, nlinfeastol_, casadi::Nlpsol::nx_, opttol_, and casadi::BlocksqpMemory::tol.
Referenced by run().
| void casadi::Blocksqp::calcSR1 | ( | BlocksqpMemory * | m, |
| const double * | gamma, | ||
| const double * | delta, | ||
| casadi_int | b | ||
| ) | const |
Definition at line 2207 of file blocksqp.cpp.
References casadi::casadi_norm_2(), dim_, eps_, casadi::get_ptr(), casadi::BlocksqpMemory::hess, casadi::BlocksqpMemory::hessSkipped, casadi::BlocksqpMemory::noUpdateCounter, and casadi::BlocksqpMemory::nTotalSkippedUpdates.
Referenced by calcHessianUpdate(), and calcHessianUpdateLimitedMemory().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_kh
Definition at line 1559 of file function_internal.hpp.
References casadi::FunctionInternal::all_scalar(), casadi::FunctionInternal::call_gen(), casadi::FunctionInternal::matching_arg(), casadi::FunctionInternal::n_out_, and casadi::FunctionInternal::replace_arg().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_ku
Definition at line 3029 of file function_internal.cpp.
References casadi::SharedObjectInternal::class_name(), casadi::FunctionInternal::enable_fd_, casadi::FunctionInternal::enable_forward_, casadi::FunctionInternal::forward(), casadi::FunctionInternal::fwdViaJac(), casadi::FunctionInternal::has_derivative(), casadi::FunctionInternal::has_forward(), casadi::FunctionInternal::jacobian(), casadi::FunctionInternal::matching_arg(), casadi::FunctionInternal::max_num_dir_, casadi::FunctionInternal::n_in_, casadi::FunctionInternal::n_out_, casadi::ProtoFunction::name_, casadi::FunctionInternal::replace_fseed(), casadi::FunctionInternal::size2_out(), and casadi::FunctionInternal::size_out().
Referenced by casadi::Rootfinder::ad_forward(), casadi::Call::ad_forward(), casadi::MXFunction::ad_forward(), casadi::XFunction< DerivedType, MatType, NodeType >::call_forward(), casadi::MX::forward(), casadi::Integrator::get_forward_dae(), and casadi::Scpgen::init().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_ku
Definition at line 3248 of file function_internal.cpp.
References casadi::SharedObjectInternal::class_name().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_kg
Definition at line 3922 of file function_internal.cpp.
References casadi::FunctionInternal::eval_mx(), casadi::FunctionInternal::n_in_, casadi::FunctionInternal::n_out_, and casadi::FunctionInternal::size2_in().
Referenced by casadi::FunctionInternal::call().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_kg
Definition at line 1663 of file function_internal.hpp.
References casadi::ProtoFunction::error_on_fail_, casadi::FunctionInternal::eval_gen(), casadi::get_ptr(), casadi::ProtoFunction::memory(), casadi::FunctionInternal::n_in_, casadi::FunctionInternal::n_out_, casadi::FunctionInternal::nnz_in(), casadi::FunctionInternal::nnz_out(), casadi::FunctionInternal::project_arg(), casadi::FunctionInternal::size2_in(), casadi::FunctionInternal::sparsity_out(), casadi::FunctionInternal::sz_arg(), casadi::FunctionInternal::sz_iw(), casadi::FunctionInternal::sz_res(), casadi::FunctionInternal::sz_w(), and casadi::GenericMatrix< Matrix< Scalar > >::zeros().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_kv
Definition at line 3134 of file function_internal.cpp.
References casadi::FunctionInternal::adjViaJac(), casadi::SharedObjectInternal::class_name(), casadi::FunctionInternal::enable_reverse_, casadi::FunctionInternal::has_derivative(), casadi::FunctionInternal::has_reverse(), casadi::FunctionInternal::jacobian(), casadi::FunctionInternal::matching_res(), casadi::FunctionInternal::max_num_dir_, casadi::FunctionInternal::n_in_, casadi::FunctionInternal::n_out_, casadi::ProtoFunction::name_, casadi::FunctionInternal::replace_aseed(), casadi::FunctionInternal::reverse(), casadi::FunctionInternal::size2_in(), casadi::FunctionInternal::size_in(), and casadi::T.
Referenced by casadi::Rootfinder::ad_reverse(), casadi::MXFunction::ad_reverse(), casadi::Call::ad_reverse(), casadi::XFunction< DerivedType, MatType, NodeType >::call_reverse(), casadi::Scpgen::init(), and casadi::MX::reverse().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_kv
Definition at line 3261 of file function_internal.cpp.
References casadi::SharedObjectInternal::class_name().
|
inherited |
Definition at line 1198 of file nlpsol.cpp.
References casadi::OracleMemory::arg, casadi::NlpsolMemory::d_nlp, casadi::Nlpsol::fcallback_, casadi::ProtoFunctionMemory::fstats, casadi::GenericShared< Shared, Internal >::is_null(), casadi::Nlpsol::iteration_callback_ignore_errors_, casadi::OracleMemory::iw, casadi::Function::n_in(), casadi::Function::n_out(), casadi::NLPSOL_F, casadi::NLPSOL_G, casadi::NLPSOL_LAM_G, casadi::NLPSOL_LAM_X, casadi::NLPSOL_X, casadi::Nlpsol::nx_, casadi::ProtoFunction::print(), casadi::OracleMemory::res, casadi::OracleMemory::w, and casadi::CasadiException::what().
Referenced by casadi::Feasiblesqpmethod::solve(), casadi::Qrsqp::solve(), and casadi::Sqpmethod::solve().
|
overridevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_k5
Reimplemented from casadi::ProtoFunction.
Reimplemented in casadi::MXFunction.
Definition at line 433 of file function_internal.cpp.
References casadi::FunctionInternal::ad_weight_, casadi::FunctionInternal::ad_weight_sp_, casadi::ProtoFunction::change_option(), casadi::FunctionInternal::dump_, casadi::FunctionInternal::dump_dir_, casadi::FunctionInternal::dump_format_, casadi::FunctionInternal::dump_in_, casadi::FunctionInternal::dump_out_, casadi::FunctionInternal::print_canonical_, casadi::FunctionInternal::print_in_, casadi::FunctionInternal::print_out_, and casadi::GenericType::to_string().
Referenced by casadi::FmuFunction::change_option(), and casadi::MXFunction::change_option().
|
inherited |
Raises errors.
| npar[in] | normal usage: 1, disallow pararallel calls: -1 | |
| [out] | npar | max number of horizontal repetitions across all arguments (or -1) |
Extra doc: https://github.com/casadi/casadi/wiki/L_ki
Definition at line 1710 of file function_internal.hpp.
References casadi::FunctionInternal::check_mat(), casadi::FunctionInternal::n_in_, casadi::FunctionInternal::name_in_, casadi::FunctionInternal::size1_in(), casadi::FunctionInternal::size2_in(), casadi::FunctionInternal::sparsity_in(), and casadi::str().
Referenced by casadi::FunctionInternal::mapsum_mx(), and casadi::FunctionInternal::matching_arg().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_1nx
Definition at line 690 of file nlpsol.cpp.
References casadi::NlpsolMemory::d_nlp, casadi::Nlpsol::get_default_in(), casadi::inf, casadi::FunctionInternal::inputs_check_, casadi::NLPSOL_G, casadi::NLPSOL_LBG, casadi::NLPSOL_LBX, casadi::NLPSOL_UBG, casadi::NLPSOL_UBX, casadi::NLPSOL_X0, casadi::FunctionInternal::nnz_out(), casadi::Nlpsol::nx_, casadi::str(), and casadi::Nlpsol::warn_initial_bounds_.
Referenced by casadi::Nlpsol::eval(), casadi::AlpaqaInterface::set_work(), and casadi::SLEQPInterface::set_work().
|
staticinherited |
Helper function
| npar[in] | normal usage: 1, disallow pararallel calls: -1 |
| npar[out] | required number of parallel calls (or -1) |
Definition at line 3460 of file function_internal.cpp.
References casadi::Sparsity::is_empty(), casadi::Sparsity::is_scalar(), casadi::Sparsity::is_vector(), casadi::Sparsity::size(), casadi::Sparsity::size1(), and casadi::Sparsity::size2().
Referenced by casadi::FunctionInternal::check_arg(), casadi::FunctionInternal::check_res(), and casadi::FunctionInternal::mapsum_mx().
|
inlinevirtualinherited |
Purpose if to allow more helpful error messages
Extra doc: https://github.com/casadi/casadi/wiki/L_2b7
Reimplemented in casadi::FmuFunction.
Definition at line 179 of file function_internal.hpp.
Referenced by casadi::ProtoFunction::checkout().
|
inherited |
Raises errors.
| npar[in] | normal usage: 1, disallow pararallel calls: -1 | |
| [out] | npar | max number of horizontal repetitions across all arguments (or -1) |
Extra doc: https://github.com/casadi/casadi/wiki/L_kj
Definition at line 1734 of file function_internal.hpp.
References casadi::FunctionInternal::check_mat(), casadi::FunctionInternal::n_out_, casadi::FunctionInternal::name_out_, casadi::FunctionInternal::size_out(), casadi::FunctionInternal::sparsity_out(), and casadi::str().
Referenced by casadi::FunctionInternal::matching_res().
|
inherited |
Definition at line 3669 of file function_internal.cpp.
References casadi::ProtoFunction::alloc_mem(), casadi::ProtoFunction::check_mem_count(), and casadi::ProtoFunction::init_mem().
Referenced by casadi::ProtoFunction::finalize(), casadi::FunctionBuffer::FunctionBuffer(), and casadi::Sqpmethod::init_mem().
|
inlineoverridevirtual |
Extra doc: https://github.com/casadi/casadi/wiki/L_1o4
Reimplemented from casadi::Nlpsol.
Definition at line 160 of file blocksqp.hpp.
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_jq
Definition at line 3557 of file function_internal.cpp.
References casadi::ProtoFunction::free_mem().
Referenced by casadi::AlpaqaInterface::~AlpaqaInterface(), casadi::AmplInterface::~AmplInterface(), casadi::BlazingSplineFunction::~BlazingSplineFunction(), ~Blocksqp(), casadi::BonminInterface::~BonminInterface(), casadi::BSplineInterpolant::~BSplineInterpolant(), casadi::CallbackInternal::~CallbackInternal(), casadi::CbcInterface::~CbcInterface(), casadi::ClarabelInterface::~ClarabelInterface(), casadi::ClpInterface::~ClpInterface(), casadi::CplexInterface::~CplexInterface(), casadi::CsparseInterface::~CsparseInterface(), casadi::CvodesInterface::~CvodesInterface(), casadi::DaqpInterface::~DaqpInterface(), casadi::External::~External(), casadi::FastNewton::~FastNewton(), casadi::FatropConicInterface::~FatropConicInterface(), casadi::FatropInterface::~FatropInterface(), casadi::Feasiblesqpmethod::~Feasiblesqpmethod(), casadi::FiniteDiff::~FiniteDiff(), casadi::FixedStepIntegrator::~FixedStepIntegrator(), casadi::FmuFunction::~FmuFunction(), casadi::GurobiInterface::~GurobiInterface(), casadi::HighsInterface::~HighsInterface(), casadi::HpipmInterface::~HpipmInterface(), casadi::HpmpcInterface::~HpmpcInterface(), casadi::IdasInterface::~IdasInterface(), casadi::ImplicitToNlp::~ImplicitToNlp(), casadi::IpoptInterface::~IpoptInterface(), casadi::Ipqp::~Ipqp(), casadi::JitFunction::~JitFunction(), casadi::KinsolInterface::~KinsolInterface(), casadi::KnitroInterface::~KnitroInterface(), casadi::LapackLu::~LapackLu(), casadi::LapackQr::~LapackQr(), casadi::LinearInterpolant::~LinearInterpolant(), casadi::LinearInterpolantJac::~LinearInterpolantJac(), casadi::LinsolLdl::~LinsolLdl(), casadi::LinsolQr::~LinsolQr(), casadi::LinsolTridiag::~LinsolTridiag(), casadi::Lsqr::~Lsqr(), casadi::Ma27Interface::~Ma27Interface(), casadi::MadnlpInterface::~MadnlpInterface(), casadi::Map::~Map(), casadi::MapSum::~MapSum(), casadi::MumpsInterface::~MumpsInterface(), casadi::MXFunction::~MXFunction(), casadi::Newton::~Newton(), casadi::Nlpsol::~Nlpsol(), casadi::OmpMap::~OmpMap(), casadi::OoqpInterface::~OoqpInterface(), casadi::OsqpInterface::~OsqpInterface(), casadi::ProxqpInterface::~ProxqpInterface(), casadi::QpoasesInterface::~QpoasesInterface(), casadi::QpToNlp::~QpToNlp(), casadi::Qrqp::~Qrqp(), casadi::Qrsqp::~Qrsqp(), casadi::Scpgen::~Scpgen(), casadi::SLEQPInterface::~SLEQPInterface(), casadi::SlicotDple::~SlicotDple(), casadi::SlicotExpm::~SlicotExpm(), casadi::SnoptInterface::~SnoptInterface(), casadi::Sqpmethod::~Sqpmethod(), casadi::SuperscsInterface::~SuperscsInterface(), casadi::Switch::~Switch(), casadi::SXFunction::~SXFunction(), casadi::SymbolicQr::~SymbolicQr(), casadi::ThreadMap::~ThreadMap(), and casadi::WorhpInterface::~WorhpInterface().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_lm
Definition at line 2390 of file function_internal.cpp.
References casadi::CodeGenerator::body, casadi::FunctionInternal::codegen_body(), casadi::FunctionInternal::definition(), casadi::CodeGenerator::flush(), casadi::CodeGenerator::scope_enter(), casadi::CodeGenerator::scope_exit(), and casadi::FunctionInternal::signature().
Referenced by casadi::CodeGenerator::add_dependency().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_lt
Reimplemented in casadi::External.
Definition at line 2438 of file function_internal.cpp.
References casadi::FunctionInternal::codegen_mem_type(), casadi::FunctionInternal::codegen_name(), and casadi::CodeGenerator::shorthand().
Referenced by casadi::CodeGenerator::add_dependency().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_m0
Reimplemented in casadi::XFunction< DerivedType, MatType, NodeType >, casadi::XFunction< MXFunction, MX, MXNode >, casadi::XFunction< SXFunction, Matrix< SXElem >, SXNode >, casadi::Sqpmethod, casadi::Qrqp, casadi::LinearInterpolantJac, casadi::LinearInterpolant, casadi::Feasiblesqpmethod, casadi::FastNewton, casadi::BSplineInterpolant, casadi::OsqpInterface, casadi::MadnlpInterface, casadi::IpoptInterface, casadi::HpipmInterface, casadi::HighsInterface, casadi::FatropInterface, casadi::DaqpInterface, casadi::ClarabelInterface, casadi::SXFunction, casadi::Switch, casadi::MXFunction, casadi::MapSum, casadi::ThreadMap, casadi::OmpMap, casadi::Map, casadi::JitFunction, casadi::FiniteDiff, casadi::External, and casadi::BlazingSplineFunction.
Definition at line 2826 of file function_internal.cpp.
References casadi::SharedObjectInternal::class_name(), and casadi::ProtoFunction::name_.
Referenced by casadi::FunctionInternal::codegen(), and casadi::BSplineInterpolant::codegen_body().
|
overridevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_1o0
Reimplemented from casadi::OracleFunction.
Definition at line 1256 of file nlpsol.cpp.
References casadi::OracleFunction::codegen_body_enter(), casadi::CodeGenerator::constant(), casadi::CodeGenerator::copy_default(), casadi::Nlpsol::detect_simple_bounds_is_simple_, casadi::Nlpsol::detect_simple_bounds_parts_, casadi::Nlpsol::detect_simple_bounds_target_g_, casadi::Nlpsol::detect_simple_bounds_target_x_, casadi::CodeGenerator::local(), casadi::Nlpsol::ng_, casadi::NLPSOL_F, casadi::NLPSOL_G, casadi::NLPSOL_LAM_G, casadi::NLPSOL_LAM_G0, casadi::NLPSOL_LAM_P, casadi::NLPSOL_LAM_X, casadi::NLPSOL_LAM_X0, casadi::NLPSOL_LBG, casadi::NLPSOL_LBX, casadi::NLPSOL_P, casadi::NLPSOL_UBG, casadi::NLPSOL_UBX, casadi::NLPSOL_X, casadi::NLPSOL_X0, casadi::Nlpsol::np_, casadi::Nlpsol::nx_, casadi::CodeGenerator::shorthand(), casadi::str(), casadi::Function::sz_arg(), casadi::Function::sz_iw(), casadi::Function::sz_res(), casadi::Function::sz_w(), and casadi::CodeGenerator::wrapper().
Referenced by casadi::FatropInterface::codegen_body(), casadi::IpoptInterface::codegen_body(), casadi::MadnlpInterface::codegen_body(), casadi::Feasiblesqpmethod::codegen_body(), and casadi::Sqpmethod::codegen_body().
|
overridevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_27k
Reimplemented from casadi::OracleFunction.
Definition at line 1346 of file nlpsol.cpp.
References casadi::CodeGenerator::bound_consistency(), casadi::Nlpsol::bound_consistency_, casadi::Nlpsol::calc_f_, casadi::Nlpsol::calc_g_, casadi::Nlpsol::calc_lam_p_, casadi::Nlpsol::calc_lam_x_, casadi::OracleFunction::codegen_body_exit(), casadi::CodeGenerator::copy(), casadi::CodeGenerator::copy_check(), casadi::Nlpsol::detect_simple_bounds_is_simple_, casadi::OracleFunction::get_function(), casadi::CodeGenerator::init_local(), casadi::CodeGenerator::local(), casadi::Nlpsol::ng_, casadi::Nlpsol::np_, casadi::Nlpsol::nx_, casadi::CodeGenerator::scal(), and casadi::str().
Referenced by casadi::FatropInterface::codegen_body(), casadi::IpoptInterface::codegen_body(), casadi::MadnlpInterface::codegen_body(), and casadi::Sqpmethod::codegen_body().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_lw
Reimplemented in casadi::External.
Definition at line 2447 of file function_internal.cpp.
References casadi::FunctionInternal::alloc_mem(), casadi::CodeGenerator::auxiliaries, casadi::FunctionInternal::codegen_mem_type(), casadi::FunctionInternal::codegen_name(), casadi::ProtoFunction::init_mem(), and casadi::CodeGenerator::shorthand().
Referenced by casadi::CodeGenerator::add_dependency().
|
overridevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_27j
Reimplemented from casadi::FunctionInternal.
Reimplemented in casadi::Sqpmethod, casadi::Feasiblesqpmethod, casadi::MadnlpInterface, casadi::IpoptInterface, and casadi::FatropInterface.
Definition at line 1327 of file nlpsol.cpp.
References casadi::CodeGenerator::add_auxiliary(), casadi::CodeGenerator::add_dependency(), casadi::CodeGenerator::AUX_FILL, casadi::Nlpsol::calc_f_, casadi::Nlpsol::calc_g_, casadi::Nlpsol::calc_lam_p_, casadi::Nlpsol::calc_lam_x_, casadi::Nlpsol::detect_simple_bounds_is_simple_, casadi::Nlpsol::detect_simple_bounds_parts_, casadi::OracleFunction::get_function(), casadi::CodeGenerator::shorthand(), and casadi::CodeGenerator::wrapper().
Referenced by casadi::FatropInterface::codegen_declarations(), casadi::IpoptInterface::codegen_declarations(), casadi::MadnlpInterface::codegen_declarations(), casadi::Feasiblesqpmethod::codegen_declarations(), and casadi::Sqpmethod::codegen_declarations().
|
inlinevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_ls
Reimplemented in casadi::MXFunction, and casadi::External.
Definition at line 854 of file function_internal.hpp.
Referenced by casadi::CodeGenerator::add_dependency(), and casadi::FunctionInternal::codegen_meta().
|
inlinevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_lv
Reimplemented in casadi::OsqpInterface, casadi::MadnlpInterface, casadi::IpoptInterface, casadi::HighsInterface, casadi::FatropInterface, casadi::DaqpInterface, casadi::ClarabelInterface, and casadi::External.
Definition at line 869 of file function_internal.hpp.
Referenced by casadi::CodeGenerator::add_dependency().
|
inlinevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_lr
Reimplemented in casadi::MXFunction, and casadi::External.
Definition at line 849 of file function_internal.hpp.
Referenced by casadi::CodeGenerator::add_dependency(), and casadi::FunctionInternal::codegen_meta().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_lu
Reimplemented in casadi::OsqpInterface, casadi::MadnlpInterface, casadi::IpoptInterface, casadi::HighsInterface, casadi::FatropInterface, casadi::DaqpInterface, casadi::ClarabelInterface, and casadi::External.
Definition at line 2434 of file function_internal.cpp.
Referenced by casadi::CodeGenerator::add_dependency().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_lq
Definition at line 2816 of file function_internal.cpp.
References casadi::FunctionInternal::codegen_name(), and casadi::CodeGenerator::shorthand().
Referenced by casadi::ClarabelInterface::codegen_body(), casadi::DaqpInterface::codegen_body(), casadi::FatropInterface::codegen_body(), casadi::HighsInterface::codegen_body(), casadi::IpoptInterface::codegen_body(), casadi::MadnlpInterface::codegen_body(), casadi::OsqpInterface::codegen_body(), casadi::Sqpmethod::codegen_body(), casadi::ClarabelInterface::codegen_free_mem(), casadi::DaqpInterface::codegen_free_mem(), casadi::FatropInterface::codegen_free_mem(), casadi::HighsInterface::codegen_free_mem(), casadi::IpoptInterface::codegen_free_mem(), casadi::MadnlpInterface::codegen_free_mem(), casadi::OsqpInterface::codegen_free_mem(), casadi::ClarabelInterface::codegen_init_mem(), casadi::DaqpInterface::codegen_init_mem(), casadi::FatropInterface::codegen_init_mem(), casadi::HighsInterface::codegen_init_mem(), casadi::IpoptInterface::codegen_init_mem(), casadi::MadnlpInterface::codegen_init_mem(), and casadi::OsqpInterface::codegen_init_mem().
|
inlinevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_m1
Reimplemented in casadi::Sqpmethod, casadi::OsqpInterface, casadi::MadnlpInterface, casadi::IpoptInterface, casadi::HighsInterface, casadi::FatropInterface, casadi::DaqpInterface, casadi::ClarabelInterface, and casadi::External.
Definition at line 904 of file function_internal.hpp.
Referenced by casadi::CodeGenerator::add_dependency(), casadi::FunctionInternal::codegen_alloc_mem(), casadi::FunctionInternal::codegen_checkout(), casadi::FunctionInternal::codegen_meta(), casadi::CodeGenerator::operator()(), and casadi::CodeGenerator::setup_callback().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_ln
Definition at line 2484 of file function_internal.cpp.
References casadi::all(), casadi::CodeGenerator::array(), casadi::CodeGenerator::body, casadi::FunctionInternal::codegen_decref(), casadi::FunctionInternal::codegen_incref(), casadi::FunctionInternal::codegen_mem_type(), casadi::FunctionInternal::codegen_name(), casadi::FunctionInternal::codegen_sparsities(), casadi::FunctionInternal::codegen_sz_arg(), casadi::FunctionInternal::codegen_sz_iw(), casadi::FunctionInternal::codegen_sz_res(), casadi::FunctionInternal::codegen_sz_w(), casadi::CodeGenerator::constant(), casadi::CodeGenerator::declare(), casadi::CodeGenerator::flush(), casadi::CodeGenerator::from_mex(), casadi::FunctionInternal::get_default_in(), casadi::CodeGenerator::header, casadi::FunctionInternal::is_diff_in_, casadi::FunctionInternal::is_diff_out_, casadi::CodeGenerator::main, casadi::CodeGenerator::mex, casadi::FunctionInternal::n_in_, casadi::FunctionInternal::n_out_, casadi::ProtoFunction::name_, casadi::FunctionInternal::name_in_, casadi::FunctionInternal::name_out_, casadi::FunctionInternal::nnz_in(), casadi::FunctionInternal::nnz_out(), casadi::CodeGenerator::printf(), casadi::CodeGenerator::res(), casadi::Sparsity::size1(), casadi::Sparsity::size2(), casadi::FunctionInternal::sparsity_in_, casadi::FunctionInternal::sparsity_out_, casadi::str(), casadi::FunctionInternal::sz_arg(), casadi::FunctionInternal::sz_iw(), casadi::FunctionInternal::sz_res(), casadi::FunctionInternal::sz_w(), casadi::CodeGenerator::to_mex(), casadi::CodeGenerator::with_header, and casadi::CodeGenerator::with_mem.
Referenced by casadi::CodeGenerator::add().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_lp
Definition at line 2801 of file function_internal.cpp.
References casadi::CodeGenerator::added_functions_, casadi::ProtoFunction::name_, and casadi::str().
Referenced by casadi::FunctionInternal::codegen_alloc_mem(), casadi::FunctionInternal::codegen_checkout(), casadi::Call::codegen_decref(), casadi::Call::codegen_incref(), casadi::FunctionInternal::codegen_mem(), casadi::FunctionInternal::codegen_meta(), casadi::FunctionInternal::codegen_release(), and casadi::CodeGenerator::mem().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_lx
Reimplemented in casadi::External.
Definition at line 2473 of file function_internal.cpp.
References casadi::FunctionInternal::codegen_name(), and casadi::CodeGenerator::shorthand().
Referenced by casadi::CodeGenerator::add_dependency().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_lo
Definition at line 2480 of file function_internal.cpp.
References casadi::CodeGenerator::add_io_sparsities(), casadi::ProtoFunction::name_, casadi::FunctionInternal::sparsity_in_, and casadi::FunctionInternal::sparsity_out_.
Referenced by casadi::FunctionInternal::codegen_meta().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_29g
Definition at line 2913 of file function_internal.cpp.
References casadi::FunctionInternal::sz_arg().
Referenced by casadi::FunctionInternal::codegen_meta().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_29g
Definition at line 2919 of file function_internal.cpp.
References casadi::FunctionInternal::sz_iw().
Referenced by casadi::FunctionInternal::codegen_meta().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_29g
Definition at line 2916 of file function_internal.cpp.
References casadi::FunctionInternal::sz_res().
Referenced by casadi::FunctionInternal::codegen_meta().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_29g
Reimplemented in casadi::SXFunction.
Definition at line 2922 of file function_internal.cpp.
References casadi::FunctionInternal::sz_w().
Referenced by casadi::FunctionInternal::codegen_meta().
| void casadi::Blocksqp::computeNextHessian | ( | BlocksqpMemory * | m, |
| casadi_int | idx, | ||
| casadi_int | maxQP | ||
| ) | const |
Definition at line 2254 of file blocksqp.cpp.
References calcHessianUpdateLimitedMemory(), casadi::casadi_copy(), dim_, fallback_scaling_, fallback_update_, casadi::BlocksqpMemory::hess, casadi::BlocksqpMemory::hess1, casadi::BlocksqpMemory::hess2, hess_damp_, hess_lim_mem_, casadi::BlocksqpMemory::itCount, nblocks_, and which_second_derv_.
Referenced by solveQP().
|
inherited |
Prepares the function for evaluation
Extra doc: https://github.com/casadi/casadi/wiki/L_jf
Definition at line 138 of file function_internal.cpp.
References casadi::Options::check(), casadi::SharedObjectInternal::class_name(), casadi::ProtoFunction::finalize(), casadi::ProtoFunction::get_options(), casadi::ProtoFunction::init(), casadi::Options::is_sane(), casadi::ProtoFunction::name_, and casadi::Options::sanitize().
Referenced by casadi::Function::create(), casadi::FmuFunction::factory(), casadi::FmuFunction::get_forward(), casadi::FmuFunction::get_jacobian(), casadi::LinearInterpolant::get_jacobian(), and casadi::FmuFunction::get_reverse().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_ks
Definition at line 1834 of file function_internal.hpp.
References casadi::FunctionInternal::get_default_in(), casadi::FunctionInternal::index_in(), and casadi::FunctionInternal::n_in_.
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_ks
Definition at line 1822 of file function_internal.hpp.
References casadi::FunctionInternal::n_in_, casadi::FunctionInternal::name_in_, and casadi::str().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_ks
Definition at line 1863 of file function_internal.hpp.
References casadi::FunctionInternal::index_out(), and casadi::FunctionInternal::n_out_.
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_ks
Definition at line 1851 of file function_internal.hpp.
References casadi::FunctionInternal::n_out_, casadi::FunctionInternal::name_out_, and casadi::str().
| void casadi::Blocksqp::convertHessian | ( | BlocksqpMemory * | m | ) | const |
Convert array *hess to a single symmetric sparse matrix in Harwell-Boeing format (as used by qpOASES)
Definition at line 2712 of file blocksqp.cpp.
References dim_, eps_, casadi::BlocksqpMemory::hess, casadi::BlocksqpMemory::hess_lag, casadi::BlocksqpMemory::hessIndCol, casadi::BlocksqpMemory::hessIndLo, casadi::BlocksqpMemory::hessIndRow, nblocks_, casadi::Nlpsol::nx_, and casadi::ProtoFunction::print().
Referenced by solveQP().
|
inherited |
Create an oracle function as a forward derivative of a different function
Definition at line 278 of file oracle_function.cpp.
References casadi::FunctionInternal::forward_name(), casadi::OracleFunction::get_function(), casadi::OracleFunction::has_function(), and casadi::OracleFunction::set_function().
Referenced by casadi::Integrator::init(), casadi::ImplicitFixedStepIntegrator::init(), casadi::SLEQPInterface::init(), casadi::SundialsInterface::init(), and casadi::RungeKutta::setup_step().
|
inherited |
Create an oracle function, using a different oracle function Temporary addition to allow transition from one oracle formulation to another.
Definition at line 235 of file oracle_function.cpp.
References casadi::combine(), casadi::OracleFunction::common_options_, casadi::Function::factory(), casadi::Function::get_free(), casadi::Function::has_free(), casadi::FunctionInternal::incache(), casadi::Function::n_in(), casadi::Function::n_out(), casadi::ProtoFunction::name_, casadi::OracleFunction::oracle(), casadi::OracleFunction::set_function(), casadi::OracleFunction::specific_options_, casadi::str(), casadi::FunctionInternal::tocache_if_missing(), and casadi::ProtoFunction::verbose_.
Referenced by casadi::OracleFunction::create_function(), casadi::Integrator::init(), casadi::Nlpsol::init(), casadi::AlpaqaInterface::init(), init(), casadi::BonminInterface::init(), casadi::FatropInterface::init(), casadi::IpoptInterface::init(), casadi::KnitroInterface::init(), casadi::MadnlpInterface::init(), casadi::SLEQPInterface::init(), casadi::SnoptInterface::init(), casadi::SundialsInterface::init(), casadi::WorhpInterface::init(), casadi::Feasiblesqpmethod::init(), casadi::Qrsqp::init(), and casadi::Sqpmethod::init().
|
inherited |
Create an oracle function from MX
Definition at line 187 of file oracle_function.cpp.
References casadi::combine(), casadi::OracleFunction::common_options_, casadi::FunctionInternal::Function, casadi::Function::get_free(), casadi::Function::has_free(), casadi::FunctionInternal::incache(), casadi::Function::n_in(), casadi::Function::n_out(), casadi::ProtoFunction::name_, casadi::OracleFunction::set_function(), casadi::OracleFunction::specific_options_, casadi::str(), casadi::FunctionInternal::tocache_if_missing(), and casadi::ProtoFunction::verbose_.
|
inherited |
Create an oracle function
Definition at line 179 of file oracle_function.cpp.
References casadi::OracleFunction::create_function(), and casadi::OracleFunction::oracle_.
|
staticinherited |
Definition at line 206 of file nlpsol.cpp.
References casadi::FunctionInternal::Function, casadi::NL_F, casadi::NL_G, casadi::NL_INPUTS, casadi::NL_NUM_IN, casadi::NL_NUM_OUT, casadi::NL_OUTPUTS, casadi::NL_P, and casadi::NL_X.
Referenced by casadi::construct_nlpsol().
|
inlinestatic |
Definition at line 163 of file blocksqp.hpp.
Referenced by casadi::casadi_register_nlpsol_blocksqp().
|
inherited |
Definition at line 62 of file generic_shared_internal.hpp.
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_ma
Definition at line 1025 of file function_internal.cpp.
References casadi::FunctionInternal::is_diff_in_, casadi::FunctionInternal::is_diff_out_, casadi::FunctionInternal::n_in_, casadi::FunctionInternal::n_out_, casadi::ProtoFunction::name_, casadi::FunctionInternal::name_in_, casadi::FunctionInternal::name_out_, casadi::FunctionInternal::sparsity_in_, and casadi::FunctionInternal::sparsity_out_.
Referenced by casadi::FunctionInternal::codegen(), casadi::FunctionInternal::disp(), casadi::MXFunction::should_inline(), and casadi::SXFunction::should_inline().
|
inlinestatic |
Definition at line 406 of file blocksqp.hpp.
Referenced by casadi::casadi_register_nlpsol_blocksqp().
|
inlineprotectedinherited |
Called in the destructor of singletons
Definition at line 77 of file generic_shared_internal.hpp.
|
inherited |
Definition at line 2127 of file function_internal.cpp.
References casadi::FunctionInternal::name_in_, and casadi::FunctionInternal::name_out_.
Referenced by casadi::FunctionInternal::forward(), and casadi::FunctionInternal::reverse().
|
overridevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_m8
Implements casadi::SharedObjectInternal.
Definition at line 1046 of file function_internal.cpp.
References casadi::SharedObjectInternal::class_name(), casadi::FunctionInternal::definition(), and casadi::FunctionInternal::disp_more().
Referenced by casadi::MXFunction::eval(), and casadi::SXFunction::eval().
|
overridevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_1nt
Reimplemented from casadi::FunctionInternal.
Definition at line 919 of file nlpsol.cpp.
References casadi::SharedObject::disp(), and casadi::OracleFunction::oracle_.
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_l7
Definition at line 3328 of file function_internal.cpp.
References casadi::FunctionInternal::n_in_.
Referenced by casadi::FunctionInternal::nz_in().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_l7
Definition at line 3304 of file function_internal.cpp.
References casadi::FunctionInternal::sparsity_in(), and casadi::GenericMatrix< MatType >::zeros().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_l7
Definition at line 3336 of file function_internal.cpp.
References casadi::FunctionInternal::n_out_.
Referenced by casadi::FunctionInternal::nz_out().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_l7
Definition at line 3308 of file function_internal.cpp.
References casadi::FunctionInternal::sparsity_out(), and casadi::GenericMatrix< MatType >::zeros().
|
staticinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_26j
Definition at line 1880 of file function_internal.hpp.
References casadi::Sparsity::size1(), and casadi::Sparsity::size2().
|
finalvirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_kb
Reimplemented from casadi::FunctionInternal.
Definition at line 781 of file nlpsol.cpp.
References casadi::Nlpsol::bound_consistency(), casadi::Nlpsol::bound_consistency_, casadi::Nlpsol::calc_f_, casadi::OracleFunction::calc_function(), casadi::Nlpsol::calc_g_, casadi::Nlpsol::calc_lam_p_, casadi::Nlpsol::calc_lam_x_, casadi::casadi_copy(), casadi::casadi_fill(), casadi::casadi_scal(), casadi::Nlpsol::check_inputs(), casadi::NlpsolMemory::d_nlp, casadi::ProtoFunction::error_on_fail_, casadi::OracleFunction::join_results(), casadi::nan, casadi::Nlpsol::ng_, casadi::Nlpsol::np_, casadi::Nlpsol::nx_, casadi::FunctionInternal::setup(), casadi::Nlpsol::solve(), casadi::SOLVER_RET_EXCEPTION, and casadi::SOLVER_RET_SUCCESS.
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_ke
Reimplemented in casadi::CallbackInternal.
Definition at line 2110 of file function_internal.cpp.
References casadi::SharedObjectInternal::class_name().
Referenced by casadi::FunctionInternal::eval().
|
inlineinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_kf
Definition at line 435 of file function_internal.hpp.
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_kb
Definition at line 914 of file function_internal.cpp.
References casadi::FunctionInternal::checkout_, casadi::FunctionInternal::dump_, casadi::FunctionInternal::dump_in_, casadi::FunctionInternal::dump_out_, casadi::FunctionInternal::eval(), casadi::FunctionInternal::eval_, casadi::FunctionInternal::n_in_, casadi::FunctionInternal::n_out_, casadi::FunctionInternal::name_in_, casadi::FunctionInternal::name_out_, casadi::FunctionInternal::nnz_in(), casadi::FunctionInternal::nnz_out(), casadi::FunctionInternal::print_in(), casadi::FunctionInternal::print_in_, casadi::FunctionInternal::print_out(), casadi::FunctionInternal::print_out_, casadi::ProtoFunction::print_time(), casadi::ProtoFunction::regularity_check_, casadi::FunctionInternal::release_, casadi::FunctionInternal::sparsity_out(), casadi::FunctionMemory::stats_available, casadi::str(), casadi::FunctionInternal::sz_w(), and casadi::uout().
Referenced by casadi::FunctionInternal::call_gen().
|
inlineinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_kf
Definition at line 431 of file function_internal.hpp.
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_kd
Reimplemented in casadi::SXFunction, and casadi::MXFunction.
Definition at line 2325 of file function_internal.cpp.
References casadi::FunctionInternal::always_inline_, casadi::Function::call(), casadi::Call::create(), casadi::ProtoFunction::name_, casadi::FunctionInternal::never_inline_, casadi::str(), and casadi::FunctionInternal::wrap().
Referenced by casadi::FunctionInternal::call_gen(), casadi::MXFunction::eval_mx(), and casadi::SXFunction::eval_mx().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_kc
Reimplemented in casadi::SXFunction, casadi::Switch, casadi::MXFunction, casadi::MapSum, and casadi::Map.
Definition at line 2114 of file function_internal.cpp.
References casadi::FunctionInternal::always_inline_, casadi::SharedObjectInternal::class_name(), casadi::CallSX::eval_sx(), and casadi::FunctionInternal::never_inline_.
Referenced by casadi::MXFunction::eval_sx(), and casadi::SXFunction::eval_sx().
| casadi_int casadi::Blocksqp::evaluate | ( | BlocksqpMemory * | m, |
| const double * | xk, | ||
| double * | f, | ||
| double * | g | ||
| ) | const |
Definition at line 2796 of file blocksqp.cpp.
References casadi::OracleMemory::arg, casadi::OracleFunction::calc_function(), casadi::NlpsolMemory::d_nlp, and casadi::OracleMemory::res.
| casadi_int casadi::Blocksqp::evaluate | ( | BlocksqpMemory * | m, |
| double * | exact_hess_lag | ||
| ) | const |
Definition at line 2807 of file blocksqp.cpp.
References casadi::OracleMemory::arg, casadi::OracleFunction::calc_function(), casadi::NlpsolMemory::d_nlp, casadi::get_ptr(), casadi::BlocksqpMemory::lam_gk, casadi::Nlpsol::ng_, casadi::Nlpsol::nx_, and casadi::OracleMemory::res.
| casadi_int casadi::Blocksqp::evaluate | ( | BlocksqpMemory * | m, |
| double * | f, | ||
| double * | g, | ||
| double * | grad_f, | ||
| double * | jac_g | ||
| ) | const |
Definition at line 2782 of file blocksqp.cpp.
References casadi::OracleMemory::arg, casadi::OracleFunction::calc_function(), casadi::NlpsolMemory::d_nlp, and casadi::OracleMemory::res.
Referenced by calcHessianUpdateExact(), feasibilityRestorationPhase(), filterLineSearch(), fullstep(), kktErrorReduction(), run(), and secondOrderCorrection().
|
inherited |
Definition at line 455 of file oracle_function.cpp.
References casadi::Function::expand(), and casadi::OracleFunction::oracle_.
Referenced by casadi::OracleFunction::init().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_m5
Reimplemented in casadi::XFunction< DerivedType, MatType, NodeType >, casadi::XFunction< MXFunction, MX, MXNode >, and casadi::XFunction< SXFunction, Matrix< SXElem >, SXNode >.
Definition at line 2285 of file function_internal.cpp.
References casadi::SharedObjectInternal::class_name().
|
virtualinherited |
Reimplemented in casadi::XFunction< DerivedType, MatType, NodeType >, casadi::XFunction< MXFunction, MX, MXNode >, casadi::XFunction< SXFunction, Matrix< SXElem >, SXNode >, casadi::FmuFunction, casadi::External, and casadi::CallbackInternal.
Definition at line 3697 of file function_internal.cpp.
References casadi::Function::factory(), and casadi::FunctionInternal::wrap().
Referenced by casadi::Function::factory(), casadi::External::factory(), and casadi::FmuFunction::factory().
| casadi_int casadi::Blocksqp::feasibilityRestorationHeuristic | ( | BlocksqpMemory * | m | ) | const |
Try to (partly) improve constraint violation by satisfying the (pseudo) continuity constraints, i.e. do a single shooting iteration with the current controls and measurement weights q and w
Definition at line 1636 of file blocksqp.cpp.
References casadi::NlpsolMemory::d_nlp, casadi::BlocksqpMemory::nRestHeurCalls, casadi::Nlpsol::nx_, and casadi::BlocksqpMemory::trial_xk.
Referenced by run().
| casadi_int casadi::Blocksqp::feasibilityRestorationPhase | ( | BlocksqpMemory * | m | ) | const |
Minimize constraint violation by solving an NLP with minimum norm objective
"The dreaded restoration phase" – Nick Gould
Definition at line 1434 of file blocksqp.cpp.
References casadi::BlocksqpMemory::alpha, casadi::NlpsolMemory::d_nlp, casadi::Function::default_in(), casadi::BlocksqpMemory::dxk, casadi::FunctionInternal::eval(), evaluate(), casadi::Function::get(), casadi::get_ptr(), casadi::BlocksqpMemory::gk, casadi::Function::index_in(), casadi::inf, casadi::FunctionInternal::info(), casadi::BlocksqpMemory::lam_gk, casadi::BlocksqpMemory::lam_qp, casadi::BlocksqpMemory::lam_xk, casadi::BlocksqpMemory::lambdaStepNorm, lInfConstraintNorm(), casadi::Function::memory(), casadi::Function::n_in(), casadi::Function::n_out(), casadi::BlocksqpMemory::nFunCalls, casadi::Nlpsol::ng_, nlinfeastol_, casadi::Nlpsol::np_, casadi::BlocksqpMemory::nRestPhaseCalls, casadi::BlocksqpMemory::nSOCS, casadi::Nlpsol::nx_, obj_up_, opttol_, pairInFilter(), casadi::ProtoFunction::print(), print_iteration_, printProgress(), casadi::BlocksqpMemory::reducedStepCount, casadi::SparsityInterface< MatType >::repmat(), resetHessian(), restore_feas_, rp_solver_, run(), casadi::Function::size1_in(), casadi::Function::sparsity_in(), casadi::Function::sparsity_out(), casadi::Function::sz_arg(), casadi::Function::sz_iw(), casadi::Function::sz_res(), casadi::Function::sz_w(), casadi::BlocksqpMemory::trial_xk, updateStats(), and casadi::GenericMatrix< MatType >::zeros().
Referenced by run().
| casadi_int casadi::Blocksqp::filterLineSearch | ( | BlocksqpMemory * | m | ) | const |
Backtracking line search based on a filter as described in Ipopt paper (Waechter 2006)
Definition at line 1217 of file blocksqp.cpp.
References acceptStep(), augmentFilter(), casadi::NlpsolMemory::d_nlp, delta_, casadi::BlocksqpMemory::dxk, eta_, evaluate(), gamma_f_, gamma_theta_, casadi::BlocksqpMemory::gk, casadi::BlocksqpMemory::grad_fk, casadi::FunctionInternal::info(), lInfConstraintNorm(), max_line_search_, casadi::BlocksqpMemory::nFunCalls, casadi::Nlpsol::nx_, casadi::BlocksqpMemory::obj, obj_up_, pairInFilter(), reduceStepsize(), s_f_, s_theta_, secondOrderCorrection(), theta_min_, and casadi::BlocksqpMemory::trial_xk.
Referenced by run().
|
overridevirtualinherited |
Reimplemented from casadi::FunctionInternal.
Definition at line 122 of file oracle_function.cpp.
References casadi::OracleFunction::all_functions_, casadi::FunctionInternal::alloc(), casadi::Function::expand(), casadi::FunctionInternal::finalize(), casadi::OracleFunction::get_function(), casadi::join(), casadi::OracleFunction::max_num_threads_, casadi::OracleFunction::monitor_, casadi::OracleFunction::post_expand_, casadi::OracleFunction::specific_options_, casadi::OracleFunction::stride_arg_, casadi::OracleFunction::stride_iw_, casadi::OracleFunction::stride_res_, casadi::OracleFunction::stride_w_, casadi::FunctionInternal::sz_arg(), casadi::FunctionInternal::sz_iw(), casadi::FunctionInternal::sz_res(), casadi::FunctionInternal::sz_w(), and casadi::Function::sz_work().
|
inlinevirtualinherited |
Reimplemented in casadi::BSplineInterpolant, casadi::SXFunction, casadi::Switch, and casadi::MXFunction.
Definition at line 376 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::add_embedded(), casadi::MX::cse(), casadi::FunctionInternal::from_compact(), and casadi::FunctionInternal::to_compact().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_jt
Definition at line 3856 of file function_internal.cpp.
References casadi::ProtoFunction::sprint().
Referenced by casadi::ProtoFunction::print_time().
|
inherited |
forward(nfwd) returns a cached instance if available, and calls Function get_forward(casadi_int nfwd) if no cached version is available.
Extra doc: https://github.com/casadi/casadi/wiki/L_l0
Definition at line 2163 of file function_internal.cpp.
References casadi::Function::assert_size_in(), casadi::Function::assert_sparsity_out(), casadi::combine(), casadi::Function::create(), casadi::FunctionInternal::der_options_, casadi::FunctionInternal::diff_prefix(), casadi::FunctionInternal::enable_fd_, casadi::FunctionInternal::enable_forward_, casadi::FunctionInternal::fd_method_, casadi::FunctionInternal::fd_options_, casadi::Function::forward(), casadi::FunctionInternal::forward_name(), casadi::FunctionInternal::forward_options_, casadi::FunctionInternal::generate_options(), casadi::FunctionInternal::get_forward(), casadi::FunctionInternal::has_derivative(), casadi::FunctionInternal::incache(), casadi::Function::n_in(), casadi::FunctionInternal::n_in_, casadi::Function::n_out(), casadi::FunctionInternal::n_out_, casadi::ProtoFunction::name_, casadi::FunctionInternal::name_in_, casadi::FunctionInternal::name_out_, casadi::FunctionInternal::size1_in(), casadi::FunctionInternal::size1_out(), casadi::FunctionInternal::size2_in(), casadi::FunctionInternal::size2_out(), casadi::FunctionInternal::sparsity_out(), casadi::FunctionInternal::tocache_if_missing(), and casadi::FunctionInternal::wrap().
Referenced by casadi::FunctionInternal::call_forward(), and casadi::Function::forward().
|
inlinestaticinherited |
Definition at line 638 of file function_internal.hpp.
References casadi::str().
Referenced by casadi::Integrator::bdae_sp_forward(), casadi::Integrator::bdae_sp_reverse(), casadi::Integrator::bquad_sp_forward(), casadi::Integrator::bquad_sp_reverse(), casadi::SundialsInterface::calc_daeB(), casadi::SundialsInterface::calc_daeF(), casadi::Integrator::calc_edot(), casadi::SundialsInterface::calc_jtimesF(), casadi::SundialsInterface::calc_quadB(), casadi::SundialsInterface::calc_quadF(), casadi::OracleFunction::create_forward(), casadi::Integrator::fdae_sp_forward(), casadi::Integrator::fdae_sp_reverse(), casadi::FunctionInternal::forward(), casadi::Integrator::fquad_sp_forward(), casadi::Integrator::fquad_sp_reverse(), casadi::Integrator::sp_jac_dae(), casadi::Integrator::sp_jac_rdae(), casadi::FixedStepIntegrator::stepB(), casadi::FixedStepIntegrator::stepF(), and casadi::Integrator::trigger_event().
|
inlineoverridevirtual |
Reimplemented from casadi::Nlpsol.
Definition at line 183 of file blocksqp.hpp.
|
virtualinherited |
Reimplemented in casadi::MXFunction.
Definition at line 3377 of file function_internal.cpp.
|
virtualinherited |
Reimplemented in casadi::SXFunction.
Definition at line 3381 of file function_internal.cpp.
|
inherited |
Definition at line 1928 of file function_internal.cpp.
References casadi::Sparsity::enlargeColumns(), casadi::Sparsity::enlargeRows(), casadi::FunctionInternal::find(), casadi::FunctionInternal::nnz_in(), casadi::FunctionInternal::nnz_out(), casadi::FunctionInternal::numel_in(), casadi::FunctionInternal::numel_out(), casadi::Sparsity::size1(), casadi::Sparsity::size2(), casadi::FunctionInternal::sparsity_in(), and casadi::FunctionInternal::sparsity_out().
Referenced by casadi::FunctionInternal::jac_sparsity().
| casadi_int casadi::Blocksqp::fullstep | ( | BlocksqpMemory * | m | ) | const |
Take a full Quasi-Newton step, except when integrator fails: xk = xk + deltaXi lambda = lambdaQP
Definition at line 1179 of file blocksqp.cpp.
References acceptStep(), casadi::NlpsolMemory::d_nlp, casadi::BlocksqpMemory::dxk, evaluate(), casadi::BlocksqpMemory::gk, casadi::FunctionInternal::info(), lInfConstraintNorm(), casadi::BlocksqpMemory::nFunCalls, casadi::Nlpsol::nx_, obj_up_, casadi::ProtoFunction::print(), reduceStepsize(), and casadi::BlocksqpMemory::trial_xk.
Referenced by run().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_nr
Definition at line 1519 of file function_internal.hpp.
References casadi::FunctionInternal::is_diff_in_, casadi::FunctionInternal::n_in_, casadi::FunctionInternal::name_in_, casadi::FunctionInternal::size_in(), casadi::FunctionInternal::sparsity_in(), and casadi::str().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_nc
Definition at line 2993 of file function_internal.cpp.
References casadi::FunctionInternal::ad_weight(), casadi::FunctionInternal::enable_fd_, casadi::FunctionInternal::enable_forward_, casadi::FunctionInternal::enable_reverse_, casadi::FunctionInternal::jac_penalty_, casadi::FunctionInternal::nnz_in(), and casadi::FunctionInternal::nnz_out().
Referenced by casadi::FunctionInternal::call_forward().
|
overridevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_j
Reimplemented from casadi::FunctionInternal.
Definition at line 428 of file oracle_function.cpp.
References casadi::CodeGenerator::add(), casadi::OracleFunction::all_functions_, casadi::CodeGenerator::generate(), and casadi::OracleFunction::oracle_.
Referenced by casadi::OracleFunction::jit_dependencies().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_ne
Definition at line 749 of file function_internal.cpp.
References casadi::FunctionInternal::n_in_, casadi::FunctionInternal::nnz_in(), casadi::normalized_out(), casadi::normalized_setup(), and casadi::Filesystem::ofstream_ptr().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_l9
Reimplemented in casadi::MXFunction.
Definition at line 3385 of file function_internal.cpp.
|
overridevirtualinherited |
Reimplemented from casadi::ProtoFunction.
Reimplemented in casadi::SXFunction, and casadi::MXFunction.
Definition at line 391 of file function_internal.cpp.
References casadi::FunctionInternal::ad_weight_, casadi::FunctionInternal::ad_weight_sp_, casadi::FunctionInternal::always_inline_, casadi::FunctionInternal::compiler_plugin_, casadi::FunctionInternal::der_options_, casadi::FunctionInternal::derivative_of_, casadi::FunctionInternal::dump_, casadi::FunctionInternal::dump_dir_, casadi::FunctionInternal::dump_format_, casadi::FunctionInternal::dump_in_, casadi::FunctionInternal::dump_out_, casadi::FunctionInternal::enable_fd_op_, casadi::FunctionInternal::enable_forward_op_, casadi::FunctionInternal::enable_jacobian_op_, casadi::FunctionInternal::enable_reverse_op_, casadi::FunctionInternal::fd_method_, casadi::FunctionInternal::fd_options_, casadi::FunctionInternal::forward_options_, casadi::ProtoFunction::generate_options(), casadi::FunctionInternal::inputs_check_, casadi::FunctionInternal::jac_penalty_, casadi::FunctionInternal::jacobian_options_, casadi::FunctionInternal::jit_, casadi::FunctionInternal::jit_base_name_, casadi::FunctionInternal::jit_cleanup_, casadi::FunctionInternal::jit_options_, casadi::FunctionInternal::jit_serialize_, casadi::FunctionInternal::jit_temp_suffix_, casadi::FunctionInternal::max_io_, casadi::FunctionInternal::max_num_dir_, casadi::FunctionInternal::never_inline_, casadi::FunctionInternal::print_canonical_, casadi::FunctionInternal::print_in_, casadi::FunctionInternal::print_out_, casadi::FunctionInternal::reverse_options_, and casadi::FunctionInternal::user_data_.
Referenced by casadi::FunctionInternal::forward(), casadi::MXFunction::generate_options(), casadi::SXFunction::generate_options(), casadi::BlazingSplineFunction::get_jacobian(), and casadi::FunctionInternal::reverse().
|
inherited |
Definition at line 765 of file function_internal.cpp.
References casadi::FunctionInternal::n_out_, casadi::FunctionInternal::nnz_out(), casadi::normalized_out(), casadi::normalized_setup(), and casadi::Filesystem::ofstream_ptr().
|
inlinevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_mp
Reimplemented in casadi::SundialsInterface, casadi::Smoothing, casadi::CentralDiff, and casadi::ForwardDiff.
Definition at line 1099 of file function_internal.hpp.
References casadi::eps.
Referenced by casadi::FiniteDiff::init().
|
inlineoverridevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_1ny
Reimplemented from casadi::FunctionInternal.
Definition at line 204 of file nlpsol_impl.hpp.
References casadi::nlpsol_default_in().
Referenced by casadi::Nlpsol::check_inputs().
|
inlinevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_ms
Reimplemented in casadi::BSplineInterpolant, casadi::Interpolant, casadi::GenericExternal, casadi::Expm, and casadi::BlazingSplineFunction.
Definition at line 1116 of file function_internal.hpp.
Referenced by casadi::GenericExternal::get_diff_in(), and casadi::FunctionInternal::init().
|
inlinevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_mt
Reimplemented in casadi::GenericExternal.
Definition at line 1121 of file function_internal.hpp.
Referenced by casadi::GenericExternal::get_diff_out(), and casadi::FunctionInternal::init().
|
overridevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_1o2
Reimplemented from casadi::FunctionInternal.
Definition at line 945 of file nlpsol.cpp.
References casadi::MX::blockcat(), casadi::Nlpsol::detect_simple_bounds_is_simple_, casadi::Function::forward(), casadi::FunctionInternal::Function, casadi::OracleFunction::get_function(), casadi::if_else(), casadi::Nlpsol::kkt(), casadi::Nlpsol::min_lam_, casadi::FunctionInternal::mx_in(), casadi::FunctionInternal::mx_out(), casadi::Nlpsol::ng_, casadi::NLPSOL_F, casadi::NLPSOL_G, casadi::NLPSOL_LAM_G, casadi::NLPSOL_LAM_G0, casadi::NLPSOL_LAM_P, casadi::NLPSOL_LAM_X, casadi::NLPSOL_LAM_X0, casadi::NLPSOL_LBG, casadi::NLPSOL_LBX, casadi::NLPSOL_NUM_IN, casadi::NLPSOL_NUM_OUT, casadi::NLPSOL_P, casadi::NLPSOL_UBG, casadi::NLPSOL_UBX, casadi::NLPSOL_X, casadi::NLPSOL_X0, casadi::Nlpsol::nx_, casadi::Nlpsol::sens_linsol_, casadi::Nlpsol::sens_linsol_options_, casadi::MX::solve(), casadi::MX::sparsity(), casadi::GenericMatrix< MX >::sym(), and casadi::MX::vertcat().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_mc
Reimplemented in casadi::SXFunction, and casadi::MXFunction.
Definition at line 1020 of file function_internal.cpp.
References casadi::FunctionInternal::has_free().
|
overridevirtualinherited |
-1 Indicates irregularity
Extra doc: https://github.com/casadi/casadi/wiki/L_i
Reimplemented from casadi::FunctionInternal.
Definition at line 531 of file oracle_function.cpp.
References casadi::OracleFunction::all_functions_.
Referenced by casadi::Rootfinder::ad_forward(), casadi::Rootfinder::ad_reverse(), casadi::OracleFunction::calc_function(), casadi::OracleFunction::calc_sp_forward(), casadi::OracleFunction::calc_sp_reverse(), casadi::FastNewton::codegen_body(), casadi::Feasiblesqpmethod::codegen_body(), casadi::Sqpmethod::codegen_body(), casadi::Nlpsol::codegen_body_exit(), casadi::Nlpsol::codegen_declarations(), casadi::FatropInterface::codegen_declarations(), casadi::IpoptInterface::codegen_declarations(), casadi::MadnlpInterface::codegen_declarations(), casadi::FastNewton::codegen_declarations(), casadi::Feasiblesqpmethod::codegen_declarations(), casadi::Sqpmethod::codegen_declarations(), casadi::Feasiblesqpmethod::codegen_feasibility_iterations(), casadi::FixedStepIntegrator::create_advanced(), casadi::OracleFunction::create_forward(), casadi::AlpaqaProblem::eval_hess_L(), casadi::AlpaqaProblem::eval_hess_ψ(), casadi::OracleFunction::finalize(), casadi::Nlpsol::get_forward(), casadi::OracleFunction::get_function(), casadi::AlpaqaProblem::get_hess_L_num_nonzeros(), casadi::AlpaqaProblem::get_hess_ψ_num_nonzeros(), casadi::Nlpsol::get_reverse(), casadi::FixedStepIntegrator::init(), casadi::ImplicitFixedStepIntegrator::init(), init(), casadi::BonminInterface::init(), casadi::FatropInterface::init(), casadi::IpoptInterface::init(), casadi::MadnlpInterface::init(), casadi::SLEQPInterface::init(), casadi::SundialsInterface::init(), casadi::FastNewton::init(), casadi::Feasiblesqpmethod::init(), casadi::Sqpmethod::init(), casadi::OracleFunction::monitored(), casadi::FatropInterface::set_fatrop_prob(), casadi::IpoptInterface::set_ipopt_prob(), casadi::MadnlpInterface::set_madnlp_prob(), casadi::SundialsInterface::set_work(), casadi::Collocation::setup_step(), casadi::RungeKutta::setup_step(), casadi::Integrator::sp_jac_dae(), and casadi::Integrator::sp_jac_rdae().
|
overridevirtualinherited |
Reimplemented from casadi::FunctionInternal.
Definition at line 540 of file oracle_function.cpp.
References casadi::OracleFunction::all_functions_, casadi::OracleFunction::get_function(), casadi::join(), and casadi::ProtoFunction::name_.
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_kz Get, if necessary generate, the sparsity of a Jacobian block
Reimplemented in casadi::FmuFunction, casadi::GenericExternal, casadi::Expm, and casadi::CallbackInternal.
Definition at line 1871 of file function_internal.cpp.
References casadi::bvec_size, casadi::FunctionInternal::get_jac_sparsity_hierarchical(), casadi::FunctionInternal::get_jac_sparsity_hierarchical_symm(), casadi::FunctionInternal::has_spfwd(), casadi::FunctionInternal::has_sprev(), casadi::GlobalOptions::hierarchical_sparsity, casadi::FunctionInternal::nnz_in(), casadi::FunctionInternal::nnz_out(), casadi::FunctionInternal::nz_in(), casadi::FunctionInternal::nz_out(), casadi::FunctionInternal::sp_weight(), and casadi::FunctionInternal::sparsity_out_.
Referenced by casadi::Expm::get_jac_sparsity(), casadi::GenericExternal::get_jac_sparsity(), and casadi::FunctionInternal::jac_sparsity().
|
inherited |
Definition at line 1216 of file function_internal.cpp.
References casadi::bvec_size, casadi::Sparsity::density(), casadi::get_ptr(), casadi::ProtoFunction::memory(), casadi::Sparsity::nnz(), casadi::FunctionInternal::nnz_in(), casadi::FunctionInternal::nnz_out(), casadi::FunctionInternal::nz_in(), casadi::FunctionInternal::nz_out(), casadi::Sparsity::size(), casadi::str(), casadi::FunctionInternal::sz_arg(), casadi::FunctionInternal::sz_iw(), casadi::FunctionInternal::sz_res(), casadi::FunctionInternal::sz_w(), casadi::Sparsity::triplet(), and casadi::ProtoFunction::verbose_.
|
inherited |
Decide which ad_mode to take
Definition at line 1556 of file function_internal.cpp.
References casadi::bvec_or(), casadi::bvec_size, casadi::bvec_toggle(), casadi::Sparsity::colind(), casadi::D, casadi::Sparsity::dense(), casadi::Sparsity::density(), casadi::diff(), casadi::Sparsity::dim(), casadi::Sparsity::get_nz(), casadi::get_ptr(), casadi::lookupvector(), casadi::ProtoFunction::memory(), casadi::Sparsity::nnz(), casadi::FunctionInternal::nnz_in(), casadi::FunctionInternal::nnz_out(), casadi::FunctionInternal::nz_in(), casadi::FunctionInternal::nz_out(), casadi::range(), casadi::Sparsity::row(), casadi::Sparsity::size(), casadi::Sparsity::size1(), casadi::Sparsity::size2(), casadi::FunctionInternal::sp_weight(), casadi::Matrix< Scalar >::sparsity(), casadi::str(), casadi::FunctionInternal::sz_arg(), casadi::FunctionInternal::sz_iw(), casadi::FunctionInternal::sz_res(), casadi::FunctionInternal::sz_w(), casadi::Sparsity::T(), casadi::Sparsity::triplet(), casadi::Matrix< casadi_int >::triplet(), casadi::Sparsity::uni_coloring(), and casadi::ProtoFunction::verbose_.
Referenced by casadi::FunctionInternal::get_jac_sparsity().
|
inherited |
A flavor of get_jac_sparsity_gen that does hierarchical block structure recognition for symmetric Jacobians
Definition at line 1321 of file function_internal.cpp.
References casadi::bvec_or(), casadi::bvec_size, casadi::bvec_toggle(), casadi::Sparsity::colind(), casadi::D, casadi::Sparsity::dense(), casadi::Sparsity::density(), casadi::diff(), casadi::Sparsity::dim(), casadi::Sparsity::get_nz(), casadi::get_ptr(), casadi::FunctionInternal::has_spfwd(), casadi::lookupvector(), casadi::Sparsity::nnz(), casadi::FunctionInternal::nnz_in(), casadi::FunctionInternal::nnz_out(), casadi::range(), casadi::Sparsity::row(), casadi::Sparsity::size(), casadi::Matrix< Scalar >::sparsity(), casadi::Sparsity::star_coloring(), casadi::str(), casadi::FunctionInternal::sz_arg(), casadi::FunctionInternal::sz_iw(), casadi::FunctionInternal::sz_res(), casadi::FunctionInternal::sz_w(), casadi::Sparsity::T(), casadi::Sparsity::triplet(), casadi::Matrix< casadi_int >::triplet(), and casadi::ProtoFunction::verbose_.
Referenced by casadi::FunctionInternal::get_jac_sparsity().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_ky
Reimplemented in casadi::LinearInterpolantJac, casadi::LinearInterpolant, casadi::BSplineInterpolant, casadi::XFunction< DerivedType, MatType, NodeType >, casadi::XFunction< MXFunction, MX, MXNode >, casadi::XFunction< SXFunction, Matrix< SXElem >, SXNode >, casadi::JitFunction, casadi::FmuFunction, casadi::External, casadi::CallbackInternal, and casadi::BlazingSplineFunction.
Definition at line 2382 of file function_internal.cpp.
References casadi::SharedObjectInternal::class_name().
Referenced by casadi::External::get_jacobian(), casadi::BSplineInterpolant::get_jacobian(), casadi::LinearInterpolantJac::get_jacobian(), and casadi::FunctionInternal::jacobian().
|
inlinevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_mm
Definition at line 1070 of file function_internal.hpp.
References casadi::inf.
|
inlinevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_mn
Definition at line 1077 of file function_internal.hpp.
References casadi::inf.
|
inlineoverridevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_1np
Reimplemented from casadi::FunctionInternal.
Definition at line 145 of file nlpsol_impl.hpp.
References casadi::NLPSOL_NUM_IN.
|
inlineoverridevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_1np
Reimplemented from casadi::FunctionInternal.
Definition at line 146 of file nlpsol_impl.hpp.
References casadi::NLPSOL_NUM_OUT.
|
inlineoverridevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_1nr
Reimplemented from casadi::FunctionInternal.
Definition at line 161 of file nlpsol_impl.hpp.
References casadi::nlpsol_in().
|
inlineoverridevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_1nr
Reimplemented from casadi::FunctionInternal.
Definition at line 162 of file nlpsol_impl.hpp.
References casadi::nlpsol_out().
|
inlinevirtualinherited |
Reimplemented in casadi::FmuFunction.
Definition at line 1081 of file function_internal.hpp.
Referenced by casadi::FmuFunction::get_nominal_in().
|
inlinevirtualinherited |
Reimplemented in casadi::FmuFunction.
Definition at line 1085 of file function_internal.hpp.
Referenced by casadi::FmuFunction::get_nominal_out().
|
inlineoverridevirtual |
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_md
Definition at line 2011 of file function_internal.cpp.
References casadi::FunctionInternal::ad_weight(), casadi::FunctionInternal::enable_fd_, casadi::FunctionInternal::enable_forward_, casadi::FunctionInternal::enable_reverse_, casadi::GenericShared< Shared, Internal >::is_null(), casadi::FunctionInternal::jac_sparsity(), casadi::ProtoFunction::name_, casadi::Sparsity::size1(), casadi::Sparsity::size2(), casadi::Sparsity::star_coloring(), casadi::str(), casadi::Sparsity::T(), casadi::Sparsity::uni_coloring(), and casadi::ProtoFunction::verbose_.
|
inlinevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_mo
Reimplemented in casadi::SundialsInterface.
Definition at line 1092 of file function_internal.hpp.
References casadi::eps.
Referenced by casadi::FiniteDiff::init().
|
overridevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_1o3
Reimplemented from casadi::FunctionInternal.
Definition at line 1076 of file nlpsol.cpp.
References casadi::MX::blockcat(), casadi::Sparsity::dense(), casadi::Nlpsol::detect_simple_bounds_is_simple_, casadi::FunctionInternal::Function, casadi::OracleFunction::get_function(), casadi::if_else(), casadi::Nlpsol::kkt(), casadi::Nlpsol::min_lam_, casadi::FunctionInternal::mx_in(), casadi::FunctionInternal::mx_out(), casadi::Nlpsol::ng_, casadi::NLPSOL_F, casadi::NLPSOL_G, casadi::NLPSOL_LAM_G, casadi::NLPSOL_LAM_G0, casadi::NLPSOL_LAM_P, casadi::NLPSOL_LAM_X, casadi::NLPSOL_LAM_X0, casadi::NLPSOL_LBG, casadi::NLPSOL_LBX, casadi::NLPSOL_NUM_IN, casadi::NLPSOL_NUM_OUT, casadi::NLPSOL_P, casadi::NLPSOL_UBG, casadi::NLPSOL_UBX, casadi::NLPSOL_X, casadi::NLPSOL_X0, casadi::Nlpsol::nx_, casadi::Function::reverse(), casadi::Nlpsol::sens_linsol_, casadi::Nlpsol::sens_linsol_options_, casadi::MX::solve(), casadi::MX::sparsity(), casadi::GenericMatrix< MX >::sym(), casadi::MX::T(), and casadi::MX::vertcat().
|
overridevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_1nq
Reimplemented from casadi::FunctionInternal.
Definition at line 371 of file nlpsol.cpp.
References casadi::Nlpsol::get_sparsity_out(), casadi::NL_P, casadi::NLPSOL_G, casadi::NLPSOL_LAM_G0, casadi::NLPSOL_LAM_X0, casadi::NLPSOL_LBG, casadi::NLPSOL_LBX, casadi::NLPSOL_NUM_IN, casadi::NLPSOL_P, casadi::NLPSOL_UBG, casadi::NLPSOL_UBX, casadi::NLPSOL_X, casadi::NLPSOL_X0, casadi::OracleFunction::oracle_, and casadi::Function::sparsity_in().
Referenced by casadi::Nlpsol::get_sparsity_out().
|
overridevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_1nq
Reimplemented from casadi::FunctionInternal.
Definition at line 389 of file nlpsol.cpp.
References casadi::Sparsity::dense(), casadi::Nlpsol::detect_simple_bounds_is_simple_, casadi::Nlpsol::get_sparsity_in(), casadi::NL_F, casadi::NL_G, casadi::NL_X, casadi::NLPSOL_F, casadi::NLPSOL_G, casadi::NLPSOL_LAM_G, casadi::NLPSOL_LAM_P, casadi::NLPSOL_LAM_X, casadi::NLPSOL_NUM_OUT, casadi::NLPSOL_P, casadi::NLPSOL_X, casadi::OracleFunction::oracle_, casadi::Function::sparsity_in(), and casadi::Function::sparsity_out().
Referenced by casadi::Nlpsol::get_sparsity_in().
|
overridevirtualinherited |
Reimplemented from casadi::FunctionInternal.
Reimplemented in casadi::Sqpmethod, casadi::Scpgen, casadi::Qrsqp, casadi::Feasiblesqpmethod, casadi::WorhpInterface, casadi::SnoptInterface, casadi::SLEQPInterface, casadi::MadnlpInterface, casadi::KnitroInterface, casadi::IpoptInterface, casadi::FatropInterface, casadi::BonminInterface, and casadi::AlpaqaInterface.
Definition at line 1239 of file nlpsol.cpp.
References casadi::assign_vector(), casadi::Nlpsol::detect_simple_bounds_is_simple_, casadi::Nlpsol::detect_simple_bounds_target_x_, casadi::OracleFunction::get_stats(), and casadi::FunctionInternal::string_from_UnifiedReturnStatus().
Referenced by casadi::AlpaqaInterface::get_stats(), casadi::BonminInterface::get_stats(), casadi::FatropInterface::get_stats(), casadi::IpoptInterface::get_stats(), casadi::KnitroInterface::get_stats(), casadi::MadnlpInterface::get_stats(), casadi::SLEQPInterface::get_stats(), casadi::SnoptInterface::get_stats(), casadi::WorhpInterface::get_stats(), casadi::Feasiblesqpmethod::get_stats(), casadi::Qrsqp::get_stats(), casadi::Scpgen::get_stats(), and casadi::Sqpmethod::get_stats().
|
inlinevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_k3
Definition at line 304 of file function_internal.hpp.
|
inherited |
Definition at line 60 of file generic_shared_internal.hpp.
|
staticinherited |
Definition at line 102 of file plugin_interface.hpp.
|
virtualinherited |
Definition at line 746 of file nlpsol.cpp.
References casadi::Nlpsol::class_name().
|
inlinevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_m3
Reimplemented in casadi::LinearInterpolantJac, casadi::LinearInterpolant, casadi::BSplineInterpolant, casadi::XFunction< DerivedType, MatType, NodeType >, casadi::XFunction< MXFunction, MX, MXNode >, casadi::XFunction< SXFunction, Matrix< SXElem >, SXNode >, casadi::Switch, casadi::MapSum, casadi::Map, casadi::JitFunction, casadi::FiniteDiff, and casadi::BlazingSplineFunction.
Definition at line 914 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::finalize().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_l4
Definition at line 2989 of file function_internal.cpp.
References casadi::FunctionInternal::enable_fd_, casadi::FunctionInternal::enable_forward_, casadi::FunctionInternal::enable_jacobian_, and casadi::FunctionInternal::enable_reverse_.
Referenced by casadi::FunctionInternal::call_forward(), casadi::FunctionInternal::call_reverse(), casadi::FunctionInternal::forward(), casadi::FunctionInternal::jacobian(), and casadi::FunctionInternal::reverse().
|
inlinevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_ke
Reimplemented in casadi::CallbackInternal.
Definition at line 424 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::eval().
|
inlineoverridevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_1o2
Reimplemented from casadi::FunctionInternal.
Definition at line 248 of file nlpsol_impl.hpp.
|
inlinevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_l8
Reimplemented in casadi::SXFunction, and casadi::MXFunction.
Definition at line 743 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::get_free().
|
overridevirtualinherited |
Reimplemented from casadi::FunctionInternal.
Definition at line 556 of file oracle_function.cpp.
References casadi::OracleFunction::all_functions_.
Referenced by casadi::OracleFunction::create_forward(), casadi::FixedStepIntegrator::init(), casadi::BonminInterface::init(), casadi::FatropInterface::init(), casadi::IpoptInterface::init(), casadi::MadnlpInterface::init(), casadi::SLEQPInterface::init(), casadi::Feasiblesqpmethod::init(), casadi::Sqpmethod::init(), casadi::OracleFunction::set_function(), and casadi::Integrator::trigger_event().
|
inlinevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_kz Get, if necessary generate, the sparsity of a Jacobian block
Reimplemented in casadi::FmuFunction, casadi::GenericExternal, casadi::Expm, and casadi::CallbackInternal.
Definition at line 633 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::get_sparsity_out(), casadi::GenericExternal::has_jac_sparsity(), and casadi::FunctionInternal::jac_sparsity().
|
inlinevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_ky
Reimplemented in casadi::LinearInterpolantJac, casadi::LinearInterpolant, casadi::BSplineInterpolant, casadi::XFunction< DerivedType, MatType, NodeType >, casadi::XFunction< MXFunction, MX, MXNode >, casadi::XFunction< SXFunction, Matrix< SXElem >, SXNode >, casadi::JitFunction, casadi::FmuFunction, casadi::External, casadi::CallbackInternal, and casadi::BlazingSplineFunction.
Definition at line 620 of file function_internal.hpp.
Referenced by casadi::External::has_jacobian(), casadi::FunctionInternal::init(), and casadi::FunctionInternal::jacobian().
|
inherited |
Definition at line 3665 of file function_internal.cpp.
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_jj
Definition at line 1004 of file function_internal.cpp.
References casadi::Options::find(), and casadi::ProtoFunction::get_options().
|
staticinherited |
Definition at line 76 of file plugin_interface.hpp.
|
inlineoverridevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_1o3
Reimplemented from casadi::FunctionInternal.
Definition at line 259 of file nlpsol_impl.hpp.
|
inlinevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_ka
Reimplemented in casadi::XFunction< DerivedType, MatType, NodeType >, casadi::XFunction< MXFunction, MX, MXNode >, casadi::XFunction< SXFunction, Matrix< SXElem >, SXNode >, casadi::Rootfinder, casadi::MapSum, casadi::Map, and casadi::Integrator.
Definition at line 394 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::get_jac_sparsity(), casadi::FunctionInternal::get_jac_sparsity_hierarchical_symm(), casadi::FunctionInternal::jac_sparsity(), and casadi::FunctionInternal::sp_weight().
|
inlinevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_ka
Reimplemented in casadi::XFunction< DerivedType, MatType, NodeType >, casadi::XFunction< MXFunction, MX, MXNode >, casadi::XFunction< SXFunction, Matrix< SXElem >, SXNode >, casadi::Rootfinder, casadi::MapSum, casadi::Map, and casadi::Integrator.
Definition at line 395 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::get_jac_sparsity(), casadi::FunctionInternal::jac_sparsity(), and casadi::FunctionInternal::sp_weight().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_lk
Definition at line 1078 of file function_internal.cpp.
References casadi::FunctionInternal::cache_.
Referenced by casadi::MapSum::create(), casadi::OracleFunction::create_function(), casadi::FunctionInternal::forward(), casadi::BlazingSplineFunction::get_jacobian(), casadi::FunctionInternal::jacobian(), casadi::FunctionInternal::map(), casadi::FunctionInternal::reverse(), and casadi::FunctionInternal::wrap().
|
inlineinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_mu
Definition at line 1126 of file function_internal.hpp.
References casadi::str().
Referenced by casadi::FunctionInternal::convert_arg().
|
inlineinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_mv
Definition at line 1138 of file function_internal.hpp.
References casadi::str().
Referenced by casadi::FunctionInternal::convert_res().
|
virtualinherited |
Obtain information about function
Reimplemented in casadi::Switch, and casadi::Map.
Definition at line 3025 of file function_internal.cpp.
Referenced by casadi::MXFunction::export_code_body(), feasibilityRestorationPhase(), filterLineSearch(), fullstep(), casadi::BSplineInterpolant::init(), kktErrorReduction(), casadi::Feasiblesqpmethod::print_iteration(), casadi::Sqpmethod::print_iteration(), secondOrderCorrection(), casadi::SnoptInterface::solve(), casadi::Feasiblesqpmethod::solve(), casadi::Sqpmethod::solve(), and casadi::Sqpmethod::solve_elastic_mode().
|
overridevirtual |
Reimplemented from casadi::Nlpsol.
Definition at line 231 of file blocksqp.cpp.
References casadi::FunctionInternal::alloc_iw(), casadi::FunctionInternal::alloc_res(), casadi::FunctionInternal::alloc_w(), Asp_, block_hess_, blocks_, col_eps_, col_tau1_, col_tau2_, casadi::Sparsity::colind(), conv_strategy_, casadi::OracleFunction::create_function(), delta_, delta_h0_, casadi::Sparsity::dense(), casadi::Sparsity::diag(), dim_, casadi::dot(), eps_, eta_, exact_hess_lag_sp_, casadi::Function::factory(), fallback_scaling_, fallback_update_, gamma_f_, gamma_theta_, casadi::OracleFunction::get_function(), globalization_, hess_damp_, hess_damp_fac_, hess_lim_mem_, hess_memsize_, hess_scaling_, hess_update_, Hsp_, casadi::inf, ini_hess_diag_, casadi::Nlpsol::init(), kappa_f_, kappa_minus_, kappa_plus_, kappa_plus_max_, kappa_soc_, linsol_plugin_, max_consec_reduced_steps_, max_consec_skipped_updates_, max_conv_qp_, max_it_qp_, max_iter_, max_line_search_, max_soc_iter_, max_time_qp_, casadi::Function::mx_in(), nblocks_, casadi::Nlpsol::ng_, nlinfeastol_, casadi::nlpsol(), casadi::Sparsity::nnz(), nnz_H_, casadi::Nlpsol::nx_, obj_lo_, obj_up_, opttol_, casadi::OracleFunction::oracle_, casadi::ProtoFunction::print(), print_header_, print_iteration_, print_maxit_reached_, qp_init_, restore_feas_, rho_, casadi::Sparsity::row(), rp_solver_, s_f_, s_theta_, schur_, casadi::Function::size1_in(), casadi::Function::size1_out(), skip_first_globalization_, casadi::Function::sparsity_jac(), casadi::str(), casadi::GenericMatrix< MX >::sym(), theta_max_, theta_min_, casadi::ProtoFunction::verbose_, casadi::MX::vertcat(), warmstart_, which_second_derv_, and zeta_.
|
overridevirtual |
Reimplemented from casadi::Nlpsol.
Definition at line 566 of file blocksqp.cpp.
References Asp_, casadi::Nlpsol::init_mem(), linsol_plugin_, casadi::Sparsity::nnz(), casadi::BlocksqpMemory::qpoases_mem, schur_, and casadi::Sparsity::size2().
| void casadi::Blocksqp::initializeFilter | ( | BlocksqpMemory * | m | ) | const |
Definition at line 1722 of file blocksqp.cpp.
References casadi::BlocksqpMemory::filter, obj_lo_, and theta_max_.
Referenced by solve().
| void casadi::Blocksqp::initIterate | ( | BlocksqpMemory * | m | ) | const |
Definition at line 2769 of file blocksqp.cpp.
References casadi::BlocksqpMemory::alpha, casadi::BlocksqpMemory::cNorm, casadi::BlocksqpMemory::gradNorm, casadi::inf, casadi::BlocksqpMemory::lambdaStepNorm, casadi::BlocksqpMemory::nSOCS, casadi::BlocksqpMemory::obj, casadi::BlocksqpMemory::reducedStepCount, casadi::BlocksqpMemory::steptype, theta_max_, and casadi::BlocksqpMemory::tol.
Referenced by solve().
|
inlineprotectedinherited |
Called in the constructor of singletons to avoid that the counter reaches zero
Definition at line 71 of file generic_shared_internal.hpp.
| void casadi::Blocksqp::initStats | ( | BlocksqpMemory * | m | ) | const |
Definition at line 2608 of file blocksqp.cpp.
References casadi::BlocksqpMemory::averageSizingFactor, casadi::BlocksqpMemory::hessDamped, casadi::BlocksqpMemory::hessSkipped, casadi::BlocksqpMemory::itCount, casadi::BlocksqpMemory::qpIterations, and casadi::BlocksqpMemory::qpItTotal.
Referenced by solve().
|
staticinherited |
Definition at line 106 of file plugin_interface.hpp.
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_ld
Reimplemented in casadi::SXFunction.
Definition at line 3402 of file function_internal.cpp.
References casadi::SharedObjectInternal::class_name().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_lb
Reimplemented in casadi::SXFunction, and casadi::MXFunction.
Definition at line 3394 of file function_internal.cpp.
References casadi::SharedObjectInternal::class_name().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_lc
Reimplemented in casadi::SXFunction, and casadi::MXFunction.
Definition at line 3398 of file function_internal.cpp.
References casadi::SharedObjectInternal::class_name().
|
virtualinherited |
Reimplemented in casadi::MXFunction.
Definition at line 3410 of file function_internal.cpp.
References casadi::SharedObjectInternal::class_name().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_le
Reimplemented in casadi::SXFunction, and casadi::MXFunction.
Definition at line 3406 of file function_internal.cpp.
References casadi::SharedObjectInternal::class_name().
|
virtualinherited |
Reimplemented in casadi::SXFunction.
Definition at line 3414 of file function_internal.cpp.
References casadi::SharedObjectInternal::class_name().
|
inlinevirtualinherited |
Reimplemented in casadi::KnitroInterface, and casadi::BonminInterface.
Definition at line 207 of file nlpsol_impl.hpp.
Referenced by casadi::Nlpsol::init().
|
overridevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_1o5
Reimplemented from casadi::FunctionInternal.
Definition at line 367 of file nlpsol.cpp.
References casadi::FunctionInternal::is_a().
Referenced by casadi::AmplInterface::init().
|
virtualinherited |
Definition at line 1858 of file function_internal.cpp.
References casadi::FunctionInternal::derivative_of_, casadi::GenericShared< Shared, Internal >::is_null(), casadi::Function::name(), and casadi::ProtoFunction::name_.
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_kz Get, if necessary generate, the sparsity of a Jacobian block
Definition at line 1946 of file function_internal.cpp.
References casadi::Sparsity::dense(), casadi::FunctionInternal::from_compact(), casadi::FunctionInternal::get_jac_sparsity(), casadi::FunctionInternal::has_jac_sparsity(), casadi::FunctionInternal::has_spfwd(), casadi::FunctionInternal::has_sprev(), casadi::FunctionInternal::is_diff_in_, casadi::FunctionInternal::is_diff_out_, casadi::GenericShared< Shared, Internal >::is_null(), casadi::Sparsity::is_symmetric(), casadi::FunctionInternal::jac_sparsity_, casadi::FunctionInternal::n_in_, casadi::FunctionInternal::n_out_, casadi::FunctionInternal::nnz_in(), casadi::FunctionInternal::nnz_out(), casadi::Sparsity::size1(), casadi::Sparsity::size2(), casadi::Sparsity::T(), and casadi::FunctionInternal::to_compact().
Referenced by casadi::FunctionInternal::get_partition(), casadi::FunctionInternal::sp_forward_block(), and casadi::FunctionInternal::sp_reverse().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_ky
Definition at line 2341 of file function_internal.cpp.
References casadi::combine(), casadi::FunctionInternal::der_options_, casadi::FunctionInternal::enable_jacobian_, casadi::FunctionInternal::get_jacobian(), casadi::FunctionInternal::has_derivative(), casadi::FunctionInternal::has_jacobian(), casadi::FunctionInternal::incache(), casadi::Function::jacobian(), casadi::FunctionInternal::jacobian_options_, casadi::Function::n_in(), casadi::FunctionInternal::n_in_, casadi::Function::n_out(), casadi::FunctionInternal::n_out_, casadi::ProtoFunction::name_, casadi::FunctionInternal::name_in_, casadi::FunctionInternal::name_out_, casadi::str(), casadi::FunctionInternal::tocache_if_missing(), and casadi::FunctionInternal::wrap().
Referenced by casadi::FunctionInternal::call_forward(), casadi::FunctionInternal::call_reverse(), and casadi::Function::jacobian().
|
overridevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_k
Reimplemented from casadi::FunctionInternal.
Definition at line 438 of file oracle_function.cpp.
References casadi::OracleFunction::all_functions_, casadi::FunctionInternal::compiler_, casadi::FunctionInternal::compiler_plugin_, casadi::external(), casadi::OracleFunction::generate_dependencies(), casadi::GenericShared< Shared, Internal >::is_null(), casadi::FunctionInternal::jit_options_, and casadi::ProtoFunction::verbose_.
|
inherited |
Definition at line 168 of file oracle_function.cpp.
References casadi::ProtoFunctionMemory::fstats, casadi::OracleFunction::max_num_threads_, and casadi::OracleMemory::thread_local_mem.
Referenced by casadi::Nlpsol::eval(), and casadi::Integrator::eval().
|
inherited |
Definition at line 924 of file nlpsol.cpp.
References casadi::Function::factory(), casadi::Nlpsol::kkt_, casadi::OracleFunction::oracle_, and casadi::GenericWeakRef< Shared, Internal >::shared_if_alive().
Referenced by casadi::Nlpsol::get_forward(), and casadi::Nlpsol::get_reverse().
| casadi_int casadi::Blocksqp::kktErrorReduction | ( | BlocksqpMemory * | m | ) | const |
If the line search fails, check if the full step reduces the KKT error by a factor kappaF.
Definition at line 1654 of file blocksqp.cpp.
References acceptStep(), calcLagrangeGradient(), casadi::casadi_norm_inf(), casadi::BlocksqpMemory::cNorm, casadi::NlpsolMemory::d_nlp, casadi::BlocksqpMemory::dxk, evaluate(), casadi::get_ptr(), casadi::BlocksqpMemory::grad_fk, casadi::FunctionInternal::info(), casadi::BlocksqpMemory::jac_g, kappa_f_, casadi::BlocksqpMemory::lam_qp, lInfConstraintNorm(), casadi::BlocksqpMemory::nFunCalls, casadi::Nlpsol::ng_, casadi::Nlpsol::nx_, obj_up_, casadi::BlocksqpMemory::tol, and casadi::BlocksqpMemory::trial_xk.
Referenced by run().
| double casadi::Blocksqp::lInfConstraintNorm | ( | BlocksqpMemory * | m, |
| const double * | xk, | ||
| const double * | g | ||
| ) | const |
Definition at line 2840 of file blocksqp.cpp.
References casadi::casadi_max_viol(), casadi::NlpsolMemory::d_nlp, casadi::Nlpsol::ng_, and casadi::Nlpsol::nx_.
Referenced by calcOptTol(), feasibilityRestorationPhase(), filterLineSearch(), fullstep(), kktErrorReduction(), and secondOrderCorrection().
|
staticinherited |
Definition at line 92 of file plugin_interface.hpp.
|
staticinherited |
Definition at line 88 of file plugin_interface.hpp.
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_m
Definition at line 465 of file oracle_function.cpp.
References casadi::ProtoFunctionMemory::add_stat(), casadi::OracleFunction::all_functions_, and casadi::ProtoFunction::init_mem().
Referenced by casadi::OracleFunction::init_mem().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_nd
Definition at line 1091 of file function_internal.cpp.
References casadi::Map::create(), casadi::FunctionInternal::incache(), casadi::Function::name(), casadi::ProtoFunction::name_, casadi::str(), and casadi::FunctionInternal::tocache_if_missing().
Referenced by casadi::Dple::get_forward(), casadi::Dple::get_reverse(), and casadi::FunctionInternal::mapsum_mx().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_kw
Definition at line 3423 of file function_internal.cpp.
References casadi::FunctionInternal::check_arg(), casadi::FunctionInternal::check_mat(), casadi::FunctionInternal::map(), casadi::FunctionInternal::n_in_, casadi::FunctionInternal::n_out_, casadi::range(), casadi::replace_mat(), casadi::FunctionInternal::size2_in(), and casadi::FunctionInternal::sparsity_in_.
|
inherited |
Raises errors
| npar[in] | normal usage: 1, disallow pararallel calls: -1 | |
| [out] | npar | max number of horizontal repetitions across all arguments (or -1) |
Extra doc: https://github.com/casadi/casadi/wiki/L_kk
Definition at line 1745 of file function_internal.hpp.
References casadi::FunctionInternal::check_arg(), casadi::FunctionInternal::n_in_, casadi::FunctionInternal::size1_in(), and casadi::FunctionInternal::size2_in().
Referenced by casadi::MXFunction::ad_forward(), casadi::SXFunction::ad_forward(), casadi::FunctionInternal::call(), casadi::FunctionInternal::call_forward(), and casadi::FunctionInternal::nz_in().
|
inherited |
Raises errors
| npar[in] | normal usage: 1, disallow pararallel calls: -1 | |
| [out] | npar | max number of horizontal repetitions across all arguments (or -1) |
Extra doc: https://github.com/casadi/casadi/wiki/L_kl
Definition at line 1755 of file function_internal.hpp.
References casadi::FunctionInternal::check_res(), casadi::FunctionInternal::n_out_, casadi::FunctionInternal::size1_out(), and casadi::FunctionInternal::size2_out().
Referenced by casadi::MXFunction::ad_reverse(), casadi::SXFunction::ad_reverse(), casadi::FunctionInternal::call_reverse(), and casadi::FunctionInternal::nz_out().
|
inherited |
Definition at line 3658 of file function_internal.cpp.
Referenced by casadi::FunctionInternal::call_gen(), casadi::FunctionInternal::get_jac_sparsity_gen(), casadi::FunctionInternal::get_jac_sparsity_hierarchical(), casadi::Sqpmethod::solve_ela_QP(), and casadi::Sqpmethod::solve_QP().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_2b8
Reimplemented in casadi::BlazingSplineFunction.
Definition at line 3372 of file function_internal.cpp.
|
virtualinherited |
Definition at line 548 of file oracle_function.cpp.
References casadi::OracleFunction::all_functions_, casadi::OracleFunction::get_function(), casadi::join(), and casadi::ProtoFunction::name_.
Referenced by casadi::OracleFunction::calc_function().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_l7
Reimplemented in casadi::MXFunction.
Definition at line 3352 of file function_internal.cpp.
References casadi::FunctionInternal::n_in_.
Referenced by casadi::Nlpsol::get_forward(), casadi::LinearInterpolantJac::get_jacobian(), casadi::Nlpsol::get_reverse(), casadi::FunctionInternal::wrap(), and casadi::FunctionInternal::wrap_as_needed().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_l7
Reimplemented in casadi::MXFunction.
Definition at line 3344 of file function_internal.cpp.
References casadi::FunctionInternal::name_in_, casadi::FunctionInternal::sparsity_in(), and casadi::GenericMatrix< MX >::sym().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_l7
Definition at line 3360 of file function_internal.cpp.
References casadi::FunctionInternal::n_out_.
Referenced by casadi::Nlpsol::get_forward(), and casadi::Nlpsol::get_reverse().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_l7
Definition at line 3348 of file function_internal.cpp.
References casadi::FunctionInternal::name_out_, casadi::FunctionInternal::sparsity_out(), and casadi::GenericMatrix< MX >::sym().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_la
Reimplemented in casadi::SXFunction, and casadi::MXFunction.
Definition at line 3390 of file function_internal.cpp.
References casadi::SharedObjectInternal::class_name().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_lf
Reimplemented in casadi::SXFunction, and casadi::MXFunction.
Definition at line 3418 of file function_internal.cpp.
References casadi::SharedObjectInternal::class_name().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_me
Definition at line 2301 of file function_internal.cpp.
References casadi::FunctionInternal::n_in_.
Referenced by casadi::FunctionInternal::adjViaJac(), casadi::FunctionInternal::call_gen(), casadi::JitFunction::codegen_body(), casadi::FunctionInternal::codegen_meta(), casadi::FunctionInternal::eval_gen(), casadi::CallbackInternal::finalize(), casadi::FunctionInternal::from_compact(), casadi::FunctionInternal::fwdViaJac(), casadi::FunctionInternal::generate_in(), casadi::FunctionInternal::get_jac_sparsity(), casadi::Expm::get_jac_sparsity(), casadi::FmuFunction::get_jac_sparsity(), casadi::FunctionInternal::get_jac_sparsity_gen(), casadi::FunctionInternal::get_jac_sparsity_hierarchical(), casadi::FunctionInternal::get_jac_sparsity_hierarchical_symm(), casadi::JitFunction::init(), casadi::Nlpsol::init(), casadi::CbcInterface::init(), casadi::ClpInterface::init(), casadi::CplexInterface::init(), casadi::OoqpInterface::init(), casadi::ProxqpInterface::init(), casadi::QpoasesInterface::init(), casadi::ImplicitToNlp::init(), casadi::FunctionInternal::jac_sparsity(), casadi::FunctionInternal::nz_in(), casadi::ImplicitToNlp::set_work(), casadi::CbcInterface::solve(), casadi::ClpInterface::solve(), casadi::CplexInterface::solve(), casadi::OoqpInterface::solve(), casadi::ProxqpInterface::solve(), casadi::QpToNlp::solve(), casadi::KinsolInterface::solve(), casadi::FunctionInternal::sp_forward(), and casadi::FunctionInternal::sp_reverse().
|
inlineinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_me
Definition at line 974 of file function_internal.hpp.
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_me
Definition at line 2307 of file function_internal.cpp.
References casadi::FunctionInternal::n_out_.
Referenced by casadi::FunctionInternal::adjViaJac(), casadi::FunctionInternal::call_gen(), casadi::Nlpsol::check_inputs(), casadi::JitFunction::codegen_body(), casadi::FunctionInternal::codegen_meta(), casadi::FunctionInternal::eval_gen(), casadi::SXFunction::eval_mx(), casadi::Switch::eval_sx(), casadi::CallbackInternal::finalize(), casadi::FunctionInternal::from_compact(), casadi::FunctionInternal::fwdViaJac(), casadi::FunctionInternal::generate_out(), casadi::FunctionInternal::get_jac_sparsity(), casadi::Expm::get_jac_sparsity(), casadi::FmuFunction::get_jac_sparsity(), casadi::FunctionInternal::get_jac_sparsity_gen(), casadi::FunctionInternal::get_jac_sparsity_hierarchical(), casadi::FunctionInternal::get_jac_sparsity_hierarchical_symm(), casadi::JitFunction::init(), casadi::Nlpsol::init(), casadi::FunctionInternal::jac_sparsity(), casadi::FunctionInternal::nz_out(), casadi::KinsolInterface::solve(), casadi::FunctionInternal::sp_forward(), and casadi::FunctionInternal::sp_reverse().
|
inlineinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_me
Definition at line 976 of file function_internal.hpp.
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_mf
Definition at line 2313 of file function_internal.cpp.
References casadi::FunctionInternal::n_in_.
Referenced by casadi::FunctionInternal::from_compact(), and casadi::Integrator::get_reverse().
|
inlineinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_mf
Definition at line 984 of file function_internal.hpp.
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_mf
Definition at line 2319 of file function_internal.cpp.
References casadi::FunctionInternal::n_out_.
Referenced by casadi::FunctionInternal::from_compact(), and casadi::Integrator::get_reverse().
|
inlineinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_mf
Definition at line 985 of file function_internal.hpp.
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_kt
Definition at line 3513 of file function_internal.cpp.
References casadi::FunctionInternal::matching_arg(), casadi::FunctionInternal::n_in_, casadi::FunctionInternal::nnz_in(), casadi::FunctionInternal::project_arg(), and casadi::FunctionInternal::replace_arg().
Referenced by casadi::SXFunction::call_fwd(), casadi::SXFunction::call_rev(), casadi::SXFunction::call_setup(), casadi::FunctionInternal::get_jac_sparsity(), casadi::FunctionInternal::get_jac_sparsity_gen(), and casadi::FunctionInternal::get_jac_sparsity_hierarchical().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_kt
Definition at line 3483 of file function_internal.cpp.
References casadi::FunctionInternal::dm_in(), casadi::FunctionInternal::n_in_, casadi::FunctionInternal::nnz_in(), casadi::Matrix< Scalar >::ptr(), and casadi::str().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_kt
Definition at line 3531 of file function_internal.cpp.
References casadi::FunctionInternal::matching_res(), casadi::FunctionInternal::n_out_, casadi::FunctionInternal::nnz_out(), casadi::FunctionInternal::project_res(), and casadi::FunctionInternal::replace_res().
Referenced by casadi::SXFunction::call_fwd(), casadi::SXFunction::call_rev(), casadi::SXFunction::call_setup(), casadi::FunctionInternal::get_jac_sparsity(), casadi::FunctionInternal::get_jac_sparsity_gen(), and casadi::FunctionInternal::get_jac_sparsity_hierarchical().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_kt
Definition at line 3498 of file function_internal.cpp.
References casadi::FunctionInternal::dm_out(), casadi::FunctionInternal::n_out_, casadi::FunctionInternal::nnz_out(), casadi::Matrix< Scalar >::ptr(), and casadi::str().
|
inlineoverridevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_h
Reimplemented from casadi::FunctionInternal.
Definition at line 147 of file oracle_function.hpp.
Referenced by casadi::OracleFunction::create_function(), casadi::AmplInterface::init(), and casadi::Scpgen::init().
| bool casadi::Blocksqp::pairInFilter | ( | BlocksqpMemory * | m, |
| double | cNorm, | ||
| double | obj | ||
| ) | const |
Check if current entry is accepted to the filter: (cNorm, obj) in F_k
Definition at line 1697 of file blocksqp.cpp.
References casadi::BlocksqpMemory::filter, gamma_f_, gamma_theta_, and nlinfeastol_.
Referenced by feasibilityRestorationPhase(), filterLineSearch(), and secondOrderCorrection().
|
staticinherited |
Definition at line 82 of file plugin_interface.hpp.
|
inlineoverridevirtual |
Implements casadi::PluginInterface< Nlpsol >.
Definition at line 157 of file blocksqp.hpp.
|
staticinherited |
Definition at line 79 of file plugin_interface.hpp.
|
staticinherited |
Definition at line 85 of file plugin_interface.hpp.
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_jr
Definition at line 3897 of file function_internal.cpp.
References casadi::uout().
Referenced by casadi::Feasiblesqpmethod::anderson_acc_step_update(), casadi::Nlpsol::callback(), convertHessian(), casadi::FmuFunction::eval_task(), casadi::Feasiblesqpmethod::feasibility_iterations(), feasibilityRestorationPhase(), fullstep(), init(), casadi::Feasiblesqpmethod::init(), casadi::Ipqp::init(), casadi::Qrqp::init(), casadi::Qrsqp::init(), casadi::Sqpmethod::init(), casadi::LinsolQr::nfact(), casadi::Feasiblesqpmethod::print_iteration(), casadi::Qrsqp::print_iteration(), casadi::Sqpmethod::print_iteration(), casadi::SundialsInterface::print_stats(), casadi::ProtoFunction::print_time(), printInfo(), printProgress(), run(), solve(), casadi::Feasiblesqpmethod::solve(), casadi::Qrsqp::solve(), casadi::Sqpmethod::solve(), casadi::Sqpmethod::solve_ela_QP(), casadi::Feasiblesqpmethod::solve_LP(), casadi::Feasiblesqpmethod::solve_QP(), casadi::Qrsqp::solve_QP(), casadi::Sqpmethod::solve_QP(), and solveQP().
|
staticinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_2di
Definition at line 858 of file function_internal.cpp.
References casadi::normalized_out(), and casadi::normalized_setup().
|
staticinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_2dh
Definition at line 873 of file function_internal.cpp.
References casadi::Sparsity::colind(), casadi::Sparsity::dim(), casadi::Sparsity::is_dense(), casadi::Sparsity::is_scalar(), casadi::Sparsity::nnz(), casadi::normalized_out(), casadi::normalized_setup(), casadi::Sparsity::row(), and casadi::Sparsity::size2().
Referenced by casadi::Monitor::eval(), casadi::MXFunction::print_arg(), casadi::SXFunction::print_arg(), casadi::FunctionInternal::print_in(), casadi::FunctionInternal::print_out(), casadi::MXFunction::print_res(), and casadi::SXFunction::print_res().
|
staticinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_2dj
Definition at line 908 of file function_internal.cpp.
References casadi::normalized_out(), and casadi::normalized_setup().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_mb
Definition at line 983 of file function_internal.cpp.
References casadi::FunctionInternal::n_in_, casadi::FunctionInternal::n_out_, casadi::FunctionInternal::name_in_, casadi::FunctionInternal::name_out_, casadi::FunctionInternal::sparsity_in_, and casadi::FunctionInternal::sparsity_out_.
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_nv
Definition at line 824 of file function_internal.cpp.
References casadi::FunctionInternal::n_in_, casadi::ProtoFunction::name_, casadi::FunctionInternal::name_in_, casadi::FunctionInternal::print_canonical(), casadi::FunctionInternal::print_canonical_, casadi::Matrix< double >::print_default(), and casadi::FunctionInternal::sparsity_in_.
Referenced by casadi::FunctionInternal::eval_gen().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_ji
Definition at line 1000 of file function_internal.cpp.
References casadi::ProtoFunction::get_options(), and casadi::Options::print_one().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_jh
Definition at line 996 of file function_internal.cpp.
References casadi::ProtoFunction::get_options(), and casadi::Options::print_all().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_nw
Definition at line 841 of file function_internal.cpp.
References casadi::FunctionInternal::n_out_, casadi::ProtoFunction::name_, casadi::FunctionInternal::name_out_, casadi::FunctionInternal::print_canonical(), casadi::FunctionInternal::print_canonical_, casadi::Matrix< double >::print_default(), and casadi::FunctionInternal::sparsity_out_.
Referenced by casadi::FunctionInternal::eval_gen().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_ju
Definition at line 3817 of file function_internal.cpp.
References casadi::ProtoFunction::format_time(), casadi::ProtoFunction::name_, casadi::ProtoFunction::print(), casadi::ProtoFunction::print_time_, and casadi::ProtoFunction::sprint().
Referenced by casadi::FunctionInternal::eval_gen().
| void casadi::Blocksqp::printInfo | ( | BlocksqpMemory * | m | ) | const |
Definition at line 1012 of file blocksqp.cpp.
References block_hess_, fallback_scaling_, fallback_update_, globalization_, hess_damp_, hess_lim_mem_, hess_scaling_, hess_update_, casadi::ProtoFunction::print(), and schur_.
Referenced by solve().
| void casadi::Blocksqp::printProgress | ( | BlocksqpMemory * | m | ) | const |
Definition at line 2555 of file blocksqp.cpp.
References casadi::BlocksqpMemory::alpha, casadi::BlocksqpMemory::averageSizingFactor, casadi::casadi_norm_1(), casadi::casadi_norm_inf(), casadi::BlocksqpMemory::cNormS, casadi::BlocksqpMemory::delta_h, casadi::BlocksqpMemory::dxk, casadi::BlocksqpMemory::gradNorm, casadi::BlocksqpMemory::hessDamped, casadi::BlocksqpMemory::hessSkipped, casadi::BlocksqpMemory::itCount, casadi::BlocksqpMemory::lambdaStepNorm, nblocks_, casadi::BlocksqpMemory::nSOCS, casadi::Nlpsol::nx_, casadi::BlocksqpMemory::obj, casadi::ProtoFunction::print(), casadi::BlocksqpMemory::qpIterations, casadi::BlocksqpMemory::qpIterations2, casadi::BlocksqpMemory::qpResolve, and casadi::BlocksqpMemory::tol.
Referenced by feasibilityRestorationPhase(), and run().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_kn
Definition at line 1617 of file function_internal.hpp.
References casadi::FunctionInternal::n_in_, casadi::FunctionInternal::size2_in(), and casadi::FunctionInternal::sparsity_in().
Referenced by casadi::FunctionInternal::call_gen(), and casadi::FunctionInternal::nz_in().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_ko
Definition at line 1657 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::nz_out().
|
staticinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_nq
Definition at line 1510 of file function_internal.hpp.
Referenced by casadi::MXFunction::ad_forward(), and casadi::MXFunction::ad_reverse().
| void casadi::Blocksqp::reduceSOCStepsize | ( | BlocksqpMemory * | m, |
| double * | alphaSOC | ||
| ) | const |
Definition at line 1150 of file blocksqp.cpp.
References casadi::NlpsolMemory::d_nlp, casadi::BlocksqpMemory::gk, casadi::inf, casadi::BlocksqpMemory::lba_qp, casadi_nlpsol_data< T1 >::lbz, casadi::Nlpsol::ng_, casadi::Nlpsol::nx_, and casadi::BlocksqpMemory::uba_qp.
| void casadi::Blocksqp::reduceStepsize | ( | BlocksqpMemory * | m, |
| double * | alpha | ||
| ) | const |
Definition at line 1145 of file blocksqp.cpp.
Referenced by filterLineSearch(), and fullstep().
|
staticinherited |
Definition at line 96 of file plugin_interface.hpp.
|
staticinherited |
Definition at line 99 of file plugin_interface.hpp.
|
inherited |
Definition at line 3690 of file function_internal.cpp.
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_km
Definition at line 1790 of file function_internal.hpp.
References casadi::replace_mat(), and casadi::FunctionInternal::sparsity_in().
Referenced by casadi::FunctionInternal::call(), casadi::FunctionInternal::nz_in(), and casadi::FunctionInternal::replace_fseed().
|
inherited |
Definition at line 1814 of file function_internal.hpp.
References casadi::FunctionInternal::replace_res().
|
inherited |
|
inherited |
Definition at line 1806 of file function_internal.hpp.
References casadi::FunctionInternal::replace_arg().
|
inherited |
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_kp
Definition at line 1798 of file function_internal.hpp.
References casadi::replace_mat(), and casadi::FunctionInternal::sparsity_out().
Referenced by casadi::FunctionInternal::nz_out(), and casadi::FunctionInternal::replace_aseed().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_2dx
Definition at line 461 of file function_internal.cpp.
References casadi::FunctionInternal::dump_count_.
| void casadi::Blocksqp::reset_sqp | ( | BlocksqpMemory * | m | ) | const |
Allocate memory for variables required by all optimization algorithms except for the Jacobian
Definition at line 2637 of file blocksqp.cpp.
References casadi::casadi_fill(), casadi::BlocksqpMemory::delta_gamma, casadi::BlocksqpMemory::delta_gamma_old, casadi::BlocksqpMemory::delta_h, casadi::BlocksqpMemory::delta_norm, casadi::BlocksqpMemory::delta_norm_old, casadi::BlocksqpMemory::deltaMat, dim_, casadi::BlocksqpMemory::dxk, casadi::BlocksqpMemory::filter, casadi::BlocksqpMemory::gamma, casadi::BlocksqpMemory::gammaMat, casadi::BlocksqpMemory::gk, casadi::BlocksqpMemory::grad_fk, casadi::BlocksqpMemory::grad_lagk, casadi::BlocksqpMemory::hess, casadi::BlocksqpMemory::hess1, casadi::BlocksqpMemory::hess2, hess_memsize_, hess_update_, casadi::BlocksqpMemory::jac_times_dxk, casadi::BlocksqpMemory::lam_gk, casadi::BlocksqpMemory::lam_qp, casadi::BlocksqpMemory::lam_xk, casadi::BlocksqpMemory::lba_qp, casadi::BlocksqpMemory::lbx_qp, nblocks_, casadi::Nlpsol::ng_, casadi::BlocksqpMemory::noUpdateCounter, casadi::Nlpsol::nx_, casadi::BlocksqpMemory::trial_xk, casadi::BlocksqpMemory::uba_qp, and casadi::BlocksqpMemory::ubx_qp.
Referenced by solve().
| void casadi::Blocksqp::resetHessian | ( | BlocksqpMemory * | m | ) | const |
Definition at line 1794 of file blocksqp.cpp.
References block_hess_, nblocks_, and which_second_derv_.
Referenced by calcHessianUpdate(), calcHessianUpdateLimitedMemory(), feasibilityRestorationPhase(), and run().
| void casadi::Blocksqp::resetHessian | ( | BlocksqpMemory * | m, |
| casadi_int | b | ||
| ) | const |
Definition at line 1804 of file blocksqp.cpp.
References blocks_, calcInitialHessian(), casadi::casadi_fill(), casadi::BlocksqpMemory::delta_gamma, casadi::BlocksqpMemory::delta_gamma_old, casadi::BlocksqpMemory::delta_norm, casadi::BlocksqpMemory::delta_norm_old, casadi::BlocksqpMemory::deltaMat, dim_, casadi::BlocksqpMemory::gammaMat, hess_memsize_, casadi::BlocksqpMemory::noUpdateCounter, and casadi::Nlpsol::nx_.
|
inherited |
reverse(nadj) returns a cached instance if available, and calls Function get_reverse(casadi_int nadj) if no cached version is available.
Extra doc: https://github.com/casadi/casadi/wiki/L_l1
Definition at line 2224 of file function_internal.cpp.
References casadi::Function::assert_size_in(), casadi::Function::assert_sparsity_out(), casadi::combine(), casadi::FunctionInternal::der_options_, casadi::FunctionInternal::diff_prefix(), casadi::FunctionInternal::enable_reverse_, casadi::FunctionInternal::generate_options(), casadi::FunctionInternal::get_reverse(), casadi::FunctionInternal::has_derivative(), casadi::FunctionInternal::incache(), casadi::Function::n_in(), casadi::FunctionInternal::n_in_, casadi::Function::n_out(), casadi::FunctionInternal::n_out_, casadi::ProtoFunction::name_, casadi::FunctionInternal::name_in_, casadi::FunctionInternal::name_out_, casadi::Function::reverse(), casadi::FunctionInternal::reverse_name(), casadi::FunctionInternal::reverse_options_, casadi::FunctionInternal::size1_in(), casadi::FunctionInternal::size1_out(), casadi::FunctionInternal::size2_in(), casadi::FunctionInternal::size2_out(), casadi::FunctionInternal::sparsity_in(), casadi::FunctionInternal::tocache_if_missing(), and casadi::FunctionInternal::wrap().
Referenced by casadi::FunctionInternal::call_reverse(), and casadi::Function::reverse().
|
inlinestaticinherited |
Definition at line 662 of file function_internal.hpp.
References casadi::str().
Referenced by casadi::FunctionInternal::reverse(), and casadi::FixedStepIntegrator::stepB().
| casadi_int casadi::Blocksqp::run | ( | BlocksqpMemory * | m, |
| casadi_int | maxIt, | ||
| casadi_int | warmStart = 0 |
||
| ) | const |
Set initial Hessian approximation
Evaluate all functions and gradients for xk_0
Check if converged
Solve QP subproblem with qpOASES or QPOPT
Determine steplength alpha
Calculate "old" Lagrange gradient: gamma = dL(xi_k, lambda_k+1)
Evaluate functions and gradients at the new xk
Check if converged
Print one line of output for the current iteration
Calculate difference of old and new Lagrange gradient:
Revise Hessian approximation
Definition at line 740 of file blocksqp.cpp.
References calcHessianUpdate(), calcHessianUpdateExact(), calcHessianUpdateLimitedMemory(), calcInitialHessian(), calcLagrangeGradient(), calcOptTol(), casadi::BlocksqpMemory::cNorm, casadi::BlocksqpMemory::dxk, evaluate(), feasibilityRestorationHeuristic(), feasibilityRestorationPhase(), filterLineSearch(), fullstep(), casadi::BlocksqpMemory::gamma, casadi::BlocksqpMemory::gk, globalization_, casadi::BlocksqpMemory::grad_fk, hess_lim_mem_, hess_scaling_, hess_update_, casadi::BlocksqpMemory::itCount, casadi::BlocksqpMemory::jac_g, kktErrorReduction(), casadi::BlocksqpMemory::lam_qp, max_consec_reduced_steps_, casadi::BlocksqpMemory::nDerCalls, nlinfeastol_, casadi::BlocksqpMemory::obj, casadi::ProtoFunction::print(), print_iteration_, printProgress(), casadi::BlocksqpMemory::reducedStepCount, resetHessian(), restore_feas_, skip_first_globalization_, solveQP(), casadi::SOLVER_RET_NAN, casadi::BlocksqpMemory::steptype, casadi::NlpsolMemory::unified_return_status, updateDeltaGamma(), updateStats(), and updateStepBounds().
Referenced by feasibilityRestorationPhase(), and solve().
| bool casadi::Blocksqp::secondOrderCorrection | ( | BlocksqpMemory * | m, |
| double | cNorm, | ||
| double | cNormTrial, | ||
| double | dfTdeltaXi, | ||
| bool | swCond, | ||
| casadi_int | it | ||
| ) | const |
Perform a second order correction step, i.e. solve the QP:
min_d d^TBd + d^T grad_fk s.t. bl <= A^Td + constr(xi+alpha*deltaXi) - A^TdeltaXi <= bu
Definition at line 1331 of file blocksqp.cpp.
References acceptStep(), casadi::NlpsolMemory::d_nlp, eta_, evaluate(), gamma_f_, gamma_theta_, casadi::get_ptr(), casadi::BlocksqpMemory::gk, casadi::FunctionInternal::info(), kappa_soc_, lInfConstraintNorm(), max_soc_iter_, casadi::BlocksqpMemory::nFunCalls, casadi::Nlpsol::ng_, casadi::Nlpsol::nx_, casadi::BlocksqpMemory::obj, obj_up_, pairInFilter(), solveQP(), theta_min_, casadi::BlocksqpMemory::trial_xk, and updateStepBounds().
Referenced by filterLineSearch().
|
inlineinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_k8
Definition at line 353 of file function_internal.hpp.
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_jv
Definition at line 4181 of file function_internal.cpp.
References casadi::ProtoFunction::serialize_body(), and casadi::ProtoFunction::serialize_type().
|
inlineoverridevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_1no
Reimplemented from casadi::ProtoFunction.
Definition at line 133 of file nlpsol_impl.hpp.
|
overridevirtual |
Reimplemented from casadi::Nlpsol.
Definition at line 2915 of file blocksqp.cpp.
References Asp_, block_hess_, blocks_, col_eps_, col_tau1_, col_tau2_, conv_strategy_, delta_, delta_h0_, dim_, eps_, eta_, exact_hess_lag_sp_, fallback_scaling_, fallback_update_, gamma_f_, gamma_theta_, globalization_, hess_damp_, hess_damp_fac_, hess_lim_mem_, hess_memsize_, hess_scaling_, hess_update_, Hsp_, ini_hess_diag_, kappa_f_, kappa_minus_, kappa_plus_, kappa_plus_max_, kappa_soc_, linsol_plugin_, max_consec_reduced_steps_, max_consec_skipped_updates_, max_conv_qp_, max_it_qp_, max_iter_, max_line_search_, max_soc_iter_, max_time_qp_, nblocks_, nlinfeastol_, nnz_H_, obj_lo_, obj_up_, opttol_, casadi::SerializingStream::pack(), print_header_, print_iteration_, print_maxit_reached_, qp_init_, restore_feas_, rho_, rp_solver_, s_f_, s_theta_, schur_, casadi::Nlpsol::serialize_body(), skip_first_globalization_, theta_max_, theta_min_, casadi::SerializingStream::version(), warmstart_, which_second_derv_, and zeta_.
|
overridevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_1nm
Reimplemented from casadi::FunctionInternal.
Definition at line 1413 of file nlpsol.cpp.
References casadi::PluginInterface< Derived >::serialize_type(), and casadi::FunctionInternal::serialize_type().
|
inlineinherited |
Register the function for evaluation and statistics gathering
Definition at line 183 of file oracle_function.hpp.
References casadi::Function::name(), and casadi::OracleFunction::set_function().
Referenced by casadi::OracleFunction::set_function().
|
inherited |
Register the function for evaluation and statistics gathering
Definition at line 286 of file oracle_function.cpp.
References casadi::OracleFunction::all_functions_, casadi::OracleFunction::RegFun::f, casadi::OracleFunction::has_function(), and casadi::OracleFunction::RegFun::jit.
Referenced by casadi::OracleFunction::create_forward(), casadi::OracleFunction::create_function(), casadi::Integrator::init(), casadi::ImplicitFixedStepIntegrator::init(), casadi::Rootfinder::init(), casadi::BonminInterface::init(), casadi::IpoptInterface::init(), casadi::SundialsInterface::init(), casadi::Feasiblesqpmethod::init(), casadi::Newton::init(), casadi::Sqpmethod::init(), casadi::Collocation::setup_step(), and casadi::RungeKutta::setup_step().
|
protectedinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_nx
Definition at line 3761 of file function_internal.cpp.
References casadi::FunctionInternal::jac_sparsity_, casadi::FunctionInternal::n_in_, casadi::FunctionInternal::n_out_, and casadi::FunctionInternal::to_compact().
|
overridevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_q
Reimplemented from casadi::FunctionInternal.
Definition at line 505 of file oracle_function.cpp.
References casadi::OracleMemory::arg, casadi::OracleFunction::max_num_threads_, casadi::OracleFunction::stride_arg_, casadi::OracleFunction::stride_iw_, casadi::OracleFunction::stride_res_, and casadi::OracleFunction::stride_w_.
|
overridevirtual |
Reimplemented from casadi::Nlpsol.
Definition at line 582 of file blocksqp.cpp.
References Asp_, dim_, exact_hess_lag_sp_, hess_memsize_, hess_update_, nblocks_, casadi::Nlpsol::ng_, casadi::Sparsity::nnz(), nnz_H_, casadi::Nlpsol::nx_, and casadi::Nlpsol::set_work().
|
virtualinherited |
Definition at line 751 of file nlpsol.cpp.
References casadi::Nlpsol::class_name().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_nb
Definition at line 3549 of file function_internal.cpp.
References casadi::FunctionInternal::set_temp(), casadi::FunctionInternal::set_work(), and casadi::FunctionMemory::stats_available.
Referenced by casadi::Conic::eval(), casadi::Nlpsol::eval(), casadi::CallbackInternal::eval(), casadi::FiniteDiff::eval(), casadi::FmuFunction::eval(), casadi::Integrator::eval(), casadi::Map::eval(), casadi::OmpMap::eval(), casadi::ThreadMap::eval(), casadi::MapSum::eval(), casadi::MXFunction::eval(), casadi::Rootfinder::eval(), casadi::Switch::eval(), casadi::SXFunction::eval(), casadi::SlicotDple::eval(), casadi::SlicotExpm::eval(), casadi::BSplineInterpolant::eval(), and casadi::LinearInterpolant::eval().
|
inlineprotectedinherited |
Definition at line 83 of file generic_shared_internal.hpp.
|
inlineprotectedinherited |
Definition at line 92 of file generic_shared_internal.hpp.
|
inlinestaticinherited |
Definition at line 293 of file nlpsol_impl.hpp.
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_ly
Definition at line 2413 of file function_internal.cpp.
Referenced by casadi::CodeGenerator::add(), casadi::FunctionInternal::codegen(), and casadi::External::codegen_declarations().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_27o
Definition at line 2418 of file function_internal.cpp.
References casadi::join(), casadi::FunctionInternal::name_in_, casadi::FunctionInternal::name_out_, and casadi::str().
Referenced by casadi::CodeGenerator::add().
|
inlineinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_mg
Definition at line 993 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::check_arg(), casadi::FmuFunction::eval(), casadi::FmuFunction::eval_task(), casadi::FunctionInternal::forward(), casadi::Integrator::get_forward(), casadi::Integrator::get_reverse(), casadi::FunctionInternal::matching_arg(), and casadi::FunctionInternal::reverse().
|
inlineinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_mg
Definition at line 995 of file function_internal.hpp.
Referenced by casadi::FmuFunction::eval_task(), casadi::FunctionInternal::forward(), casadi::Integrator::get_forward(), casadi::LinearInterpolantJac::get_jacobian(), casadi::FunctionInternal::matching_res(), and casadi::FunctionInternal::reverse().
|
inlineinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_mg
Definition at line 994 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::call_gen(), casadi::FunctionInternal::call_reverse(), casadi::FunctionInternal::check_arg(), casadi::FunctionInternal::forward(), casadi::Integrator::get_reverse(), casadi::FunctionInternal::mapsum_mx(), casadi::FunctionInternal::matching_arg(), casadi::FunctionInternal::project_arg(), and casadi::FunctionInternal::reverse().
|
inlineinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_mg
Definition at line 996 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::call_forward(), casadi::FunctionInternal::forward(), casadi::Integrator::get_forward(), casadi::LinearInterpolantJac::get_jacobian(), casadi::FunctionInternal::matching_res(), and casadi::FunctionInternal::reverse().
|
inlineinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_mg
Definition at line 997 of file function_internal.hpp.
Referenced by casadi::Rootfinder::ad_forward(), casadi::Rootfinder::ad_reverse(), casadi::MXFunction::ad_reverse(), casadi::FunctionInternal::call_reverse(), casadi::FunctionInternal::fwd_seed(), casadi::Dple::get_forward(), and casadi::Dple::get_reverse().
|
inlineinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_mg
Definition at line 1000 of file function_internal.hpp.
Referenced by casadi::MXFunction::ad_forward(), casadi::Rootfinder::ad_reverse(), casadi::FunctionInternal::call_forward(), casadi::FunctionInternal::check_res(), casadi::FunctionInternal::eval(), casadi::Integrator::get_forward(), casadi::Integrator::get_reverse(), and casadi::Nlpsol::init().
| void casadi::Blocksqp::sizeHessianCOL | ( | BlocksqpMemory * | m, |
| const double * | gamma, | ||
| const double * | delta, | ||
| casadi_int | b | ||
| ) | const |
Definition at line 1873 of file blocksqp.cpp.
References casadi::BlocksqpMemory::averageSizingFactor, col_eps_, col_tau1_, col_tau2_, casadi::BlocksqpMemory::delta_gamma, casadi::BlocksqpMemory::delta_gamma_old, casadi::BlocksqpMemory::delta_norm, casadi::BlocksqpMemory::delta_norm_old, dim_, eps_, casadi::BlocksqpMemory::hess, and casadi::BlocksqpMemory::noUpdateCounter.
Referenced by calcHessianUpdate(), and calcHessianUpdateLimitedMemory().
| void casadi::Blocksqp::sizeInitialHessian | ( | BlocksqpMemory * | m, |
| const double * | gamma, | ||
| const double * | delta, | ||
| casadi_int | b, | ||
| casadi_int | option | ||
| ) | const |
Definition at line 1834 of file blocksqp.cpp.
References casadi::BlocksqpMemory::averageSizingFactor, casadi::casadi_dot(), dim_, eps_, and casadi::BlocksqpMemory::hess.
Referenced by calcHessianUpdate(), and calcHessianUpdateLimitedMemory().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_l2
Reimplemented in casadi::XFunction< DerivedType, MatType, NodeType >, casadi::XFunction< MXFunction, MX, MXNode >, and casadi::XFunction< SXFunction, Matrix< SXElem >, SXNode >.
Definition at line 3742 of file function_internal.cpp.
References casadi::Function::slice(), and casadi::FunctionInternal::wrap().
Referenced by casadi::Function::slice().
|
overridevirtual |
Implements casadi::Nlpsol.
Definition at line 634 of file blocksqp.cpp.
References blocks_, casadi::casadi_copy(), casadi::casadi_scal(), casadi::NlpsolMemory::d_nlp, hess_lim_mem_, hess_memsize_, initializeFilter(), initIterate(), initStats(), max_iter_, nblocks_, casadi::Nlpsol::ng_, casadi::Nlpsol::nx_, casadi::ProtoFunction::print(), print_header_, print_maxit_reached_, printInfo(), qp_init_, casadi::QpoasesInterface::qpoases_init(), casadi::QpoasesInterface::qpoases_nfact(), casadi::QpoasesInterface::qpoases_sfact(), casadi::QpoasesInterface::qpoases_solve(), reset_sqp(), run(), schur_, casadi::SOLVER_RET_LIMITED, and warmstart_.
| casadi_int casadi::Blocksqp::solveQP | ( | BlocksqpMemory * | m, |
| double * | deltaXi, | ||
| double * | lambdaQP, | ||
| bool | matricesChanged = true |
||
| ) | const |
Inner loop of SQP algorithm: Solve a sequence of QPs until pos. def. assumption (G3*) is satisfied.
Definition at line 2305 of file blocksqp.cpp.
References casadi::BlocksqpMemory::A, Asp_, casadi::casadi_fill(), casadi::casadi_mv(), casadi::Sparsity::colind(), casadi::BlocksqpMemory::colind, computeNextHessian(), convertHessian(), casadi::copy_vector(), dim_, casadi::get_ptr(), globalization_, casadi::BlocksqpMemory::grad_fk, casadi::BlocksqpMemory::H, casadi::BlocksqpMemory::hess, casadi::BlocksqpMemory::hess1, casadi::BlocksqpMemory::hess2, casadi::BlocksqpMemory::hess_lag, hess_lim_mem_, hess_update_, casadi::BlocksqpMemory::hessIndCol, casadi::BlocksqpMemory::hessIndRow, casadi::BlocksqpMemory::itCount, casadi::BlocksqpMemory::jac_g, casadi::BlocksqpMemory::jac_times_dxk, casadi::BlocksqpMemory::lba_qp, casadi::BlocksqpMemory::lbx_qp, max_conv_qp_, max_it_qp_, max_time_qp_, nblocks_, casadi::Nlpsol::ng_, casadi::Nlpsol::nx_, casadi::ProtoFunction::print(), casadi::BlocksqpMemory::qp, casadi::BlocksqpMemory::qpIterations, casadi::BlocksqpMemory::qpIterations2, casadi::BlocksqpMemory::qpObj, casadi::BlocksqpMemory::qpResolve, casadi::BlocksqpMemory::rejectedSR1, casadi::Sparsity::row(), casadi::BlocksqpMemory::row, schur_, casadi::BlocksqpMemory::uba_qp, casadi::BlocksqpMemory::ubx_qp, warmstart_, and which_second_derv_.
Referenced by run(), and secondOrderCorrection().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_mw
Reimplemented in casadi::BSplineInterpolant, casadi::SXFunction, casadi::Rootfinder, casadi::MXFunction, casadi::MapSum, casadi::Map, and casadi::Integrator.
Definition at line 2838 of file function_internal.cpp.
References casadi::casadi_clear(), casadi::FunctionInternal::n_in_, casadi::FunctionInternal::n_out_, casadi::FunctionInternal::nnz_in(), casadi::FunctionInternal::nnz_out(), and casadi::FunctionInternal::sp_forward_block().
Referenced by casadi::MXFunction::sp_forward(), casadi::SXFunction::sp_forward(), and casadi::BSplineInterpolant::sp_forward().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_mx
Definition at line 2857 of file function_internal.cpp.
References casadi::Sparsity::colind(), casadi::GenericShared< Shared, Internal >::is_null(), casadi::FunctionInternal::jac_sparsity(), casadi::Sparsity::nnz(), casadi::Sparsity::row(), and casadi::Sparsity::size2().
Referenced by casadi::FunctionInternal::sp_forward().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_my
Reimplemented in casadi::BSplineInterpolant, casadi::SXFunction, casadi::Rootfinder, casadi::MXFunction, casadi::MapSum, casadi::Map, and casadi::Integrator.
Definition at line 2873 of file function_internal.cpp.
References casadi::casadi_clear(), casadi::Sparsity::colind(), casadi::GenericShared< Shared, Internal >::is_null(), casadi::FunctionInternal::jac_sparsity(), casadi::FunctionInternal::n_in_, casadi::FunctionInternal::n_out_, casadi::Sparsity::nnz(), casadi::FunctionInternal::nnz_in(), casadi::FunctionInternal::nnz_out(), casadi::Sparsity::row(), and casadi::Sparsity::size2().
Referenced by casadi::MXFunction::sp_reverse(), casadi::SXFunction::sp_reverse(), and casadi::BSplineInterpolant::sp_reverse().
|
virtualinherited |
sparsity propagation
Extra doc: https://github.com/casadi/casadi/wiki/L_l6
Definition at line 3285 of file function_internal.cpp.
References casadi::FunctionInternal::ad_weight_sp_, casadi::FunctionInternal::has_spfwd(), and casadi::FunctionInternal::has_sprev().
Referenced by casadi::FunctionInternal::get_jac_sparsity(), casadi::FunctionInternal::get_jac_sparsity_hierarchical(), casadi::MXFunction::sp_forward(), casadi::SXFunction::sp_forward(), casadi::MXFunction::sp_reverse(), casadi::SXFunction::sp_reverse(), casadi::FunctionInternal::wrap(), and casadi::FunctionInternal::wrap_as_needed().
|
inlineinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_mh
Definition at line 1009 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::check_arg(), casadi::FixedStepIntegrator::create_advanced(), casadi::FunctionInternal::dm_in(), casadi::FunctionInternal::from_compact(), casadi::FunctionInternal::fwd_seed(), casadi::Integrator::get_forward(), casadi::Integrator::get_reverse(), casadi::JitFunction::JitFunction(), casadi::FunctionInternal::mx_in(), casadi::FunctionInternal::project_arg(), casadi::FunctionInternal::replace_arg(), casadi::FunctionInternal::reverse(), casadi::HpipmInterface::set_hpipm_prob(), casadi::FunctionInternal::sx_in(), and casadi::FunctionInternal::to_compact().
|
inlineinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_mh
Definition at line 1010 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::call_gen(), casadi::FunctionInternal::check_res(), casadi::FunctionInternal::dm_out(), casadi::FmuFunction::eval(), casadi::FunctionInternal::eval_gen(), casadi::FunctionInternal::forward(), casadi::FunctionInternal::from_compact(), casadi::Integrator::get_reverse(), casadi::FmuFunction::init(), casadi::JitFunction::JitFunction(), casadi::FunctionInternal::mx_out(), casadi::FunctionInternal::replace_res(), casadi::FunctionInternal::sx_out(), and casadi::FunctionInternal::to_compact().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_js
Definition at line 3885 of file function_internal.cpp.
Referenced by casadi::ProtoFunction::format_time(), and casadi::ProtoFunction::print_time().
|
staticinherited |
Definition at line 3953 of file function_internal.cpp.
References casadi::SOLVER_RET_LIMITED, casadi::SOLVER_RET_NAN, and casadi::SOLVER_RET_SUCCESS.
Referenced by casadi::Conic::get_stats(), casadi::Nlpsol::get_stats(), and casadi::Rootfinder::get_stats().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_l7
Reimplemented in casadi::SXFunction.
Definition at line 3312 of file function_internal.cpp.
References casadi::FunctionInternal::n_in_.
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_l7
Reimplemented in casadi::SXFunction.
Definition at line 3296 of file function_internal.cpp.
References casadi::FunctionInternal::name_in_, casadi::FunctionInternal::sparsity_in(), and casadi::GenericMatrix< Matrix< Scalar > >::sym().
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_l7
Definition at line 3320 of file function_internal.cpp.
References casadi::FunctionInternal::n_out_.
|
virtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_l7
Definition at line 3300 of file function_internal.cpp.
References casadi::FunctionInternal::name_out_, casadi::FunctionInternal::sparsity_out(), and casadi::GenericMatrix< Matrix< Scalar > >::sym().
|
virtualinherited |
Reimplemented in casadi::MXFunction.
Definition at line 1150 of file function_internal.cpp.
Referenced by casadi::MXFunction::symbolic_output().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_ns
Definition at line 1535 of file function_internal.hpp.
References casadi::FunctionInternal::is_diff_out_.
|
inlineinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_n0
Definition at line 1172 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::alloc(), casadi::FunctionInternal::alloc_arg(), casadi::FunctionInternal::call_gen(), casadi::OmpMap::codegen_body(), casadi::FunctionInternal::codegen_meta(), casadi::FunctionInternal::codegen_sz_arg(), casadi::OmpMap::eval(), casadi::MXFunction::eval_sx(), casadi::OracleFunction::finalize(), casadi::FunctionInternal::get_jac_sparsity_gen(), casadi::FunctionInternal::get_jac_sparsity_hierarchical(), casadi::FunctionInternal::get_jac_sparsity_hierarchical_symm(), casadi::External::init(), casadi::Nlpsol::init(), casadi::ClarabelInterface::init(), casadi::DaqpInterface::init(), casadi::FatropConicInterface::init(), casadi::FatropInterface::init(), casadi::HighsInterface::init(), casadi::HpipmInterface::init(), casadi::MadnlpInterface::init(), casadi::Qrqp::init(), and casadi::FunctionInternal::sz_work().
|
inlineinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_n2
Definition at line 1182 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::alloc(), casadi::FunctionInternal::alloc_iw(), casadi::FunctionInternal::call_gen(), casadi::OmpMap::codegen_body(), casadi::FunctionInternal::codegen_meta(), casadi::FunctionInternal::codegen_sz_iw(), casadi::OmpMap::eval(), casadi::OracleFunction::finalize(), casadi::FunctionInternal::get_jac_sparsity_gen(), casadi::FunctionInternal::get_jac_sparsity_hierarchical(), casadi::FunctionInternal::get_jac_sparsity_hierarchical_symm(), casadi::External::init(), casadi::Nlpsol::init(), casadi::ClarabelInterface::init(), casadi::DaqpInterface::init(), casadi::FatropConicInterface::init(), casadi::FatropInterface::init(), casadi::HighsInterface::init(), casadi::HpipmInterface::init(), casadi::MadnlpInterface::init(), casadi::Feasiblesqpmethod::init(), casadi::Qrqp::init(), casadi::Sqpmethod::init(), and casadi::FunctionInternal::sz_work().
|
inlineinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_n1
Definition at line 1177 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::alloc(), casadi::FunctionInternal::alloc_res(), casadi::FunctionInternal::call_gen(), casadi::OmpMap::codegen_body(), casadi::FunctionInternal::codegen_meta(), casadi::FunctionInternal::codegen_sz_res(), casadi::OmpMap::eval(), casadi::MXFunction::eval_sx(), casadi::OracleFunction::finalize(), casadi::FunctionInternal::get_jac_sparsity_gen(), casadi::FunctionInternal::get_jac_sparsity_hierarchical(), casadi::FunctionInternal::get_jac_sparsity_hierarchical_symm(), casadi::External::init(), casadi::Nlpsol::init(), casadi::ClarabelInterface::init(), casadi::DaqpInterface::init(), casadi::FatropConicInterface::init(), casadi::FatropInterface::init(), casadi::HighsInterface::init(), casadi::HpipmInterface::init(), casadi::MadnlpInterface::init(), casadi::Qrqp::init(), and casadi::FunctionInternal::sz_work().
|
inlineinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_n3
Definition at line 1187 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::alloc(), casadi::FunctionInternal::alloc_w(), casadi::FunctionInternal::call_gen(), casadi::OmpMap::codegen_body(), casadi::FunctionInternal::codegen_meta(), casadi::FunctionInternal::codegen_sz_w(), casadi::SXFunction::codegen_sz_w(), casadi::OmpMap::eval(), casadi::FunctionInternal::eval_gen(), casadi::SXFunction::eval_mx(), casadi::OracleFunction::finalize(), casadi::FunctionInternal::get_jac_sparsity_gen(), casadi::FunctionInternal::get_jac_sparsity_hierarchical(), casadi::FunctionInternal::get_jac_sparsity_hierarchical_symm(), casadi::External::init(), casadi::MXFunction::init(), casadi::Nlpsol::init(), casadi::Rootfinder::init(), casadi::ClarabelInterface::init(), casadi::DaqpInterface::init(), casadi::FatropConicInterface::init(), casadi::FatropInterface::init(), casadi::HighsInterface::init(), casadi::HpipmInterface::init(), casadi::MadnlpInterface::init(), casadi::Feasiblesqpmethod::init(), casadi::Qrqp::init(), casadi::Sqpmethod::init(), casadi::MXFunction::sp_reverse(), casadi::SXFunction::sp_reverse(), and casadi::FunctionInternal::sz_work().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_mz
Definition at line 2905 of file function_internal.cpp.
References casadi::FunctionInternal::sz_arg(), casadi::FunctionInternal::sz_iw(), casadi::FunctionInternal::sz_res(), and casadi::FunctionInternal::sz_w().
|
inherited |
Definition at line 1921 of file function_internal.cpp.
References casadi::FunctionInternal::find(), casadi::FunctionInternal::sparsity_in(), casadi::FunctionInternal::sparsity_out(), and casadi::Sparsity::sub().
Referenced by casadi::FunctionInternal::jac_sparsity(), and casadi::FunctionInternal::set_jac_sparsity().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_ll
Definition at line 1083 of file function_internal.cpp.
References casadi::FunctionInternal::cache_, and casadi::Function::name().
Referenced by casadi::FunctionInternal::FunctionInternal(), casadi::BlazingSplineFunction::get_jacobian(), and casadi::FunctionInternal::init().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_29j
Definition at line 1087 of file function_internal.cpp.
References casadi::FunctionInternal::cache_, and casadi::Function::name().
Referenced by casadi::MapSum::create(), casadi::OracleFunction::create_function(), casadi::FunctionInternal::forward(), casadi::FunctionInternal::jacobian(), casadi::FunctionInternal::map(), casadi::FunctionInternal::reverse(), and casadi::FunctionInternal::wrap().
| void casadi::Blocksqp::updateDeltaGamma | ( | BlocksqpMemory * | m | ) | const |
Set deltaXi and gamma as a column in the matrix containing the m most recent delta and gamma
Definition at line 2247 of file blocksqp.cpp.
References casadi::BlocksqpMemory::deltaMat, casadi::BlocksqpMemory::dxk, casadi::BlocksqpMemory::gamma, casadi::BlocksqpMemory::gammaMat, hess_memsize_, casadi::BlocksqpMemory::itCount, and casadi::Nlpsol::nx_.
Referenced by run().
| void casadi::Blocksqp::updateStats | ( | BlocksqpMemory * | m | ) | const |
Definition at line 2617 of file blocksqp.cpp.
References casadi::BlocksqpMemory::hessDamped, casadi::BlocksqpMemory::hessSkipped, casadi::BlocksqpMemory::qpIterations, casadi::BlocksqpMemory::qpIterations2, casadi::BlocksqpMemory::qpItTotal, and casadi::BlocksqpMemory::qpResolve.
Referenced by feasibilityRestorationPhase(), and run().
| void casadi::Blocksqp::updateStepBounds | ( | BlocksqpMemory * | m, |
| bool | soc | ||
| ) | const |
Set bounds on the step (in the QP), either according to variable bounds in the NLP or according to trust region box radius
Definition at line 2516 of file blocksqp.cpp.
References casadi::NlpsolMemory::d_nlp, casadi::BlocksqpMemory::gk, casadi::inf, casadi::BlocksqpMemory::jac_times_dxk, casadi::BlocksqpMemory::lba_qp, casadi::BlocksqpMemory::lbx_qp, casadi_nlpsol_data< T1 >::lbz, casadi::Nlpsol::ng_, casadi::Nlpsol::nx_, casadi::BlocksqpMemory::uba_qp, and casadi::BlocksqpMemory::ubx_qp.
Referenced by run(), and secondOrderCorrection().
|
inlineoverridevirtualinherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_1o1
Reimplemented from casadi::FunctionInternal.
Definition at line 239 of file nlpsol_impl.hpp.
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_1ai
Definition at line 67 of file generic_shared_internal.hpp.
|
virtualinherited |
| [in] | s_in | Input name |
| [in] | s_out | Output name(s) |
| [in] | order | Only 1 (linear) and 2 (nonlinear) allowed |
| [in] | tr | Flip the relationship. Return which expressions contain the variables |
Extra doc: https://github.com/casadi/casadi/wiki/L_k9
Reimplemented in casadi::XFunction< DerivedType, MatType, NodeType >, casadi::XFunction< MXFunction, MX, MXNode >, and casadi::XFunction< SXFunction, Matrix< SXElem >, SXNode >.
Definition at line 3728 of file function_internal.cpp.
References casadi::Function::which_depends(), and casadi::Function::wrap().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_li
Definition at line 1128 of file function_internal.cpp.
References casadi::FunctionInternal::ad_weight(), casadi::FunctionInternal::derivative_of_, casadi::FunctionInternal::Function, casadi::FunctionInternal::incache(), casadi::FunctionInternal::is_diff_in_, casadi::FunctionInternal::is_diff_out_, casadi::FunctionInternal::max_num_dir_, casadi::FunctionInternal::mx_in(), casadi::ProtoFunction::name_, casadi::FunctionInternal::name_in_, casadi::FunctionInternal::name_out_, casadi::FunctionInternal::sp_weight(), and casadi::FunctionInternal::tocache_if_missing().
Referenced by casadi::FunctionInternal::eval_mx(), casadi::FunctionInternal::factory(), casadi::FunctionInternal::forward(), casadi::FunctionInternal::jacobian(), casadi::FunctionInternal::reverse(), casadi::FunctionInternal::slice(), and casadi::Function::wrap().
Extra doc: https://github.com/casadi/casadi/wiki/L_lj
Definition at line 1110 of file function_internal.cpp.
References casadi::FunctionInternal::ad_weight(), casadi::FunctionInternal::derivative_of_, casadi::FunctionInternal::Function, casadi::FunctionInternal::max_num_dir_, casadi::FunctionInternal::mx_in(), casadi::ProtoFunction::name_, casadi::FunctionInternal::name_in_, casadi::FunctionInternal::name_out_, and casadi::FunctionInternal::sp_weight().
Referenced by casadi::Function::wrap_as_needed().
|
inherited |
Definition at line 1364 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::ad_weight(), casadi::FunctionInternal::change_option(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::generate_options(), casadi::FunctionInternal::init(), and casadi::FunctionInternal::serialize_body().
|
inherited |
Definition at line 1364 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::change_option(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::generate_options(), casadi::FunctionInternal::init(), casadi::FunctionInternal::serialize_body(), and casadi::FunctionInternal::sp_weight().
|
protectedinherited |
Definition at line 104 of file oracle_function.hpp.
Referenced by casadi::OracleFunction::finalize(), casadi::OracleFunction::generate_dependencies(), casadi::OracleFunction::get_function(), casadi::OracleFunction::has_function(), casadi::OracleFunction::init_mem(), casadi::OracleFunction::jit_dependencies(), casadi::OracleFunction::local_init_mem(), casadi::OracleFunction::monitored(), casadi::OracleFunction::OracleFunction(), casadi::OracleFunction::serialize_body(), and casadi::OracleFunction::set_function().
|
inherited |
Definition at line 1263 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::eval_mx(), casadi::MXFunction::eval_mx(), casadi::SXFunction::eval_mx(), casadi::FunctionInternal::eval_sx(), casadi::MXFunction::eval_sx(), casadi::SXFunction::eval_sx(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::generate_options(), casadi::FunctionInternal::init(), and casadi::FunctionInternal::serialize_body().
| Sparsity casadi::Blocksqp::Asp_ |
Definition at line 202 of file blocksqp.hpp.
Referenced by Blocksqp(), calcLagrangeGradient(), init(), init_mem(), serialize_body(), set_work(), and solveQP().
| bool casadi::Blocksqp::block_hess_ |
Definition at line 356 of file blocksqp.hpp.
Referenced by Blocksqp(), calcHessianUpdate(), calcHessianUpdateLimitedMemory(), calcInitialHessian(), init(), printInfo(), resetHessian(), and serialize_body().
| std::vector<casadi_int> casadi::Blocksqp::blocks_ |
Definition at line 197 of file blocksqp.hpp.
Referenced by Blocksqp(), calcHessianUpdate(), calcHessianUpdateExact(), calcHessianUpdateLimitedMemory(), init(), resetHessian(), serialize_body(), and solve().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_1nk
Definition at line 98 of file nlpsol_impl.hpp.
Referenced by casadi::Feasiblesqpmethod::codegen_body(), casadi::Nlpsol::codegen_body_exit(), casadi::Nlpsol::eval(), casadi::Nlpsol::init(), casadi::Nlpsol::Nlpsol(), and casadi::Nlpsol::serialize_body().
Definition at line 1335 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::cache(), casadi::FunctionInternal::incache(), casadi::FunctionInternal::tocache(), and casadi::FunctionInternal::tocache_if_missing().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_26h
Definition at line 1332 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::init(), and casadi::FunctionInternal::serialize_body().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_1nk
Definition at line 97 of file nlpsol_impl.hpp.
Referenced by casadi::Nlpsol::codegen_body_exit(), casadi::Nlpsol::codegen_declarations(), casadi::Sqpmethod::codegen_declarations(), casadi::Nlpsol::eval(), casadi::Nlpsol::init(), casadi::FatropInterface::init(), casadi::MadnlpInterface::init(), casadi::Nlpsol::Nlpsol(), and casadi::Nlpsol::serialize_body().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_1nk
Definition at line 97 of file nlpsol_impl.hpp.
Referenced by casadi::Nlpsol::codegen_body_exit(), casadi::Nlpsol::codegen_declarations(), casadi::Sqpmethod::codegen_declarations(), casadi::Nlpsol::eval(), casadi::Nlpsol::init(), casadi::FatropInterface::init(), casadi::MadnlpInterface::init(), casadi::Nlpsol::Nlpsol(), and casadi::Nlpsol::serialize_body().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_1nk
Definition at line 97 of file nlpsol_impl.hpp.
Referenced by casadi::Nlpsol::codegen_body_exit(), casadi::Nlpsol::codegen_declarations(), casadi::Sqpmethod::codegen_declarations(), casadi::Nlpsol::eval(), casadi::Nlpsol::init(), casadi::Nlpsol::Nlpsol(), and casadi::Nlpsol::serialize_body().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_1nk
Definition at line 97 of file nlpsol_impl.hpp.
Referenced by casadi::Nlpsol::codegen_body_exit(), casadi::Nlpsol::codegen_declarations(), casadi::Sqpmethod::codegen_declarations(), casadi::Nlpsol::eval(), casadi::Nlpsol::init(), casadi::AlpaqaInterface::init(), casadi::Nlpsol::Nlpsol(), and casadi::Nlpsol::serialize_body().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_1nk
Definition at line 96 of file nlpsol_impl.hpp.
Referenced by casadi::Nlpsol::init(), casadi::Nlpsol::Nlpsol(), and casadi::Nlpsol::serialize_body().
|
inherited |
Definition at line 78 of file nlpsol_impl.hpp.
Referenced by casadi::Nlpsol::init(), casadi::BonminUserClass::intermediate_callback(), casadi::IpoptUserClass::intermediate_callback(), casadi::Nlpsol::Nlpsol(), and casadi::Nlpsol::serialize_body().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_nl
Definition at line 1312 of file function_internal.hpp.
Referenced by casadi::GenericExternal::any_symbol_found(), casadi::External::codegen_checkout(), casadi::External::codegen_declarations(), casadi::External::codegen_mem_type(), casadi::FunctionInternal::eval_gen(), casadi::FunctionInternal::finalize(), casadi::FunctionInternal::FunctionInternal(), casadi::GenericExternal::init_external(), and casadi::FunctionBuffer::operator=().
| double casadi::Blocksqp::col_eps_ |
Definition at line 361 of file blocksqp.hpp.
Referenced by Blocksqp(), init(), serialize_body(), and sizeHessianCOL().
| double casadi::Blocksqp::col_tau1_ |
Definition at line 362 of file blocksqp.hpp.
Referenced by Blocksqp(), init(), serialize_body(), and sizeHessianCOL().
| double casadi::Blocksqp::col_tau2_ |
Definition at line 363 of file blocksqp.hpp.
Referenced by Blocksqp(), init(), serialize_body(), and sizeHessianCOL().
|
protectedinherited |
Definition at line 86 of file oracle_function.hpp.
Referenced by casadi::OracleFunction::create_function(), casadi::OracleFunction::init(), casadi::OracleFunction::OracleFunction(), and casadi::OracleFunction::serialize_body().
|
inherited |
Definition at line 1353 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::finalize(), casadi::FunctionInternal::FunctionInternal(), casadi::Scpgen::init(), casadi::OracleFunction::jit_dependencies(), and casadi::FunctionInternal::serialize_body().
|
inherited |
Definition at line 1352 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::finalize(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::generate_options(), casadi::FunctionInternal::init(), casadi::Scpgen::init(), casadi::OracleFunction::jit_dependencies(), and casadi::FunctionInternal::serialize_body().
| casadi_int casadi::Blocksqp::conv_strategy_ |
Definition at line 373 of file blocksqp.hpp.
Referenced by Blocksqp(), init(), and serialize_body().
|
inherited |
Definition at line 1404 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::init(), and casadi::FunctionInternal::serialize_body().
| double casadi::Blocksqp::delta_ |
Definition at line 385 of file blocksqp.hpp.
Referenced by Blocksqp(), filterLineSearch(), init(), and serialize_body().
| double casadi::Blocksqp::delta_h0_ |
Definition at line 391 of file blocksqp.hpp.
Referenced by Blocksqp(), init(), and serialize_body().
|
inherited |
Definition at line 1401 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::forward(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::generate_options(), casadi::BlazingSplineFunction::get_jacobian(), casadi::FunctionInternal::init(), casadi::FunctionInternal::jacobian(), casadi::FunctionInternal::reverse(), and casadi::FunctionInternal::serialize_body().
|
inherited |
Definition at line 1346 of file function_internal.hpp.
Referenced by casadi::FiniteDiff::codegen_body(), casadi::LinearInterpolantJac::codegen_body(), casadi::FiniteDiff::codegen_declarations(), casadi::FiniteDiff::eval(), casadi::LinearInterpolantJac::eval(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::generate_options(), casadi::FiniteDiff::get_default_in(), casadi::CentralDiff::get_forward(), casadi::FunctionInternal::get_n_in(), casadi::FiniteDiff::get_n_in(), casadi::FunctionInternal::get_n_out(), casadi::FiniteDiff::get_n_out(), casadi::FunctionInternal::get_name_in(), casadi::FiniteDiff::get_name_in(), casadi::FunctionInternal::get_name_out(), casadi::FiniteDiff::get_name_out(), casadi::FunctionInternal::get_sparsity_in(), casadi::FiniteDiff::get_sparsity_in(), casadi::FunctionInternal::get_sparsity_out(), casadi::FiniteDiff::get_sparsity_out(), casadi::LinearInterpolantJac::has_parametric_grid(), casadi::LinearInterpolantJac::has_parametric_values(), casadi::FiniteDiff::init(), casadi::FunctionInternal::init(), casadi::SundialsInterface::init(), casadi::LinearInterpolantJac::init(), casadi::FunctionInternal::jac_is_symm(), casadi::BlazingSplineFunction::merge(), casadi::FunctionInternal::serialize_body(), casadi::LinearInterpolantJac::serialize_type(), casadi::FunctionInternal::wrap(), and casadi::FunctionInternal::wrap_as_needed().
|
staticinherited |
Definition at line 1455 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::deserialize().
|
inherited |
Definition at line 84 of file nlpsol_impl.hpp.
Referenced by casadi::Nlpsol::codegen_body_enter(), casadi::Nlpsol::codegen_body_exit(), casadi::Nlpsol::codegen_declarations(), casadi::Nlpsol::get_forward(), casadi::Nlpsol::get_reverse(), casadi::Nlpsol::get_sparsity_out(), casadi::Nlpsol::get_stats(), casadi::Nlpsol::init(), casadi::Nlpsol::Nlpsol(), and casadi::Nlpsol::serialize_body().
|
inherited |
Definition at line 85 of file nlpsol_impl.hpp.
Referenced by casadi::Nlpsol::codegen_body_enter(), casadi::Nlpsol::codegen_declarations(), casadi::Nlpsol::init(), casadi::Nlpsol::Nlpsol(), and casadi::Nlpsol::serialize_body().
|
inherited |
Definition at line 87 of file nlpsol_impl.hpp.
Referenced by casadi::Nlpsol::codegen_body_enter(), casadi::Nlpsol::init(), and casadi::Nlpsol::Nlpsol().
|
inherited |
Definition at line 86 of file nlpsol_impl.hpp.
Referenced by casadi::Nlpsol::codegen_body_enter(), casadi::Nlpsol::get_stats(), casadi::Nlpsol::init(), casadi::Nlpsol::Nlpsol(), and casadi::Nlpsol::serialize_body().
| std::vector<casadi_int> casadi::Blocksqp::dim_ |
Definition at line 198 of file blocksqp.hpp.
Referenced by Blocksqp(), calcBFGS(), calcHessianUpdate(), calcHessianUpdateExact(), calcHessianUpdateLimitedMemory(), calcInitialHessian(), calcSR1(), computeNextHessian(), convertHessian(), init(), reset_sqp(), resetHessian(), serialize_body(), set_work(), sizeHessianCOL(), sizeInitialHessian(), and solveQP().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_1nk
Definition at line 101 of file nlpsol_impl.hpp.
Referenced by casadi::BonminUserClass::get_variables_types(), casadi::Nlpsol::init(), casadi::Nlpsol::Nlpsol(), casadi::Nlpsol::serialize_body(), and casadi::KnitroInterface::solve().
|
inherited |
Definition at line 1392 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::change_option(), casadi::FunctionInternal::eval_gen(), casadi::FunctionInternal::finalize(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::generate_options(), and casadi::FunctionInternal::init().
|
mutableinherited |
Definition at line 1410 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::FunctionInternal(), and casadi::FunctionInternal::reset_dump_count().
|
inherited |
Definition at line 1395 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::change_option(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::generate_options(), casadi::FunctionInternal::init(), and casadi::FunctionInternal::serialize_body().
|
inherited |
Definition at line 1398 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::change_option(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::generate_options(), casadi::FunctionInternal::init(), and casadi::FunctionInternal::serialize_body().
|
inherited |
Definition at line 1392 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::change_option(), casadi::FunctionInternal::eval_gen(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::generate_options(), casadi::FunctionInternal::init(), and casadi::FunctionInternal::serialize_body().
|
inherited |
Definition at line 1392 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::change_option(), casadi::FunctionInternal::eval_gen(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::generate_options(), casadi::FunctionInternal::init(), and casadi::FunctionInternal::serialize_body().
|
inherited |
Definition at line 1360 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::ad_weight(), casadi::FunctionInternal::adjViaJac(), casadi::FunctionInternal::call_forward(), casadi::FunctionInternal::forward(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::fwdViaJac(), casadi::FunctionInternal::get_partition(), casadi::FunctionInternal::has_derivative(), casadi::FunctionInternal::init(), casadi::JitFunction::JitFunction(), and casadi::FunctionInternal::serialize_body().
|
inherited |
Definition at line 1361 of file function_internal.hpp.
Referenced by casadi::FmuFunction::FmuFunction(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::generate_options(), casadi::FunctionInternal::init(), and casadi::FunctionInternal::serialize_body().
|
inherited |
Definition at line 1360 of file function_internal.hpp.
Referenced by casadi::MXFunction::ad_forward(), casadi::FunctionInternal::ad_weight(), casadi::FunctionInternal::adjViaJac(), casadi::FunctionInternal::call_forward(), casadi::FunctionInternal::forward(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::fwdViaJac(), casadi::FunctionInternal::get_partition(), casadi::FunctionInternal::has_derivative(), casadi::FunctionInternal::init(), and casadi::FunctionInternal::serialize_body().
|
inherited |
Definition at line 1361 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::generate_options(), casadi::FunctionInternal::init(), and casadi::FunctionInternal::serialize_body().
|
inherited |
Definition at line 1360 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::has_derivative(), casadi::FunctionInternal::init(), casadi::FunctionInternal::jacobian(), and casadi::FunctionInternal::serialize_body().
|
inherited |
Definition at line 1361 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::generate_options(), casadi::FunctionInternal::init(), and casadi::FunctionInternal::serialize_body().
|
inherited |
Definition at line 1360 of file function_internal.hpp.
Referenced by casadi::MXFunction::ad_reverse(), casadi::FunctionInternal::ad_weight(), casadi::FunctionInternal::adjViaJac(), casadi::FunctionInternal::call_reverse(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::fwdViaJac(), casadi::FunctionInternal::get_partition(), casadi::FunctionInternal::has_derivative(), casadi::FunctionInternal::init(), casadi::FunctionInternal::reverse(), and casadi::FunctionInternal::serialize_body().
|
inherited |
Definition at line 1361 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::generate_options(), casadi::FunctionInternal::init(), and casadi::FunctionInternal::serialize_body().
| double casadi::Blocksqp::eps_ |
Definition at line 341 of file blocksqp.hpp.
Referenced by Blocksqp(), calcBFGS(), calcSR1(), convertHessian(), init(), serialize_body(), sizeHessianCOL(), and sizeInitialHessian().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_1nk
Definition at line 102 of file nlpsol_impl.hpp.
Referenced by casadi::Nlpsol::init(), casadi::FatropInterface::init(), casadi::Nlpsol::Nlpsol(), and casadi::Nlpsol::serialize_body().
|
inherited |
Definition at line 261 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::call_gen(), casadi::ClarabelInterface::codegen_body(), casadi::DaqpInterface::codegen_body(), casadi::FatropInterface::codegen_body(), casadi::HighsInterface::codegen_body(), casadi::HpipmInterface::codegen_body(), casadi::IpoptInterface::codegen_body(), casadi::MadnlpInterface::codegen_body(), casadi::OsqpInterface::codegen_body(), casadi::Qrqp::codegen_body(), casadi::Conic::Conic(), casadi::Conic::eval(), casadi::Nlpsol::eval(), casadi::Rootfinder::eval(), casadi::ProtoFunction::generate_options(), casadi::ProtoFunction::init(), casadi::Nlpsol::Nlpsol(), casadi::ProtoFunction::ProtoFunction(), casadi::Rootfinder::Rootfinder(), casadi::ProtoFunction::serialize_body(), and casadi::KinsolInterface::solve().
| double casadi::Blocksqp::eta_ |
Definition at line 392 of file blocksqp.hpp.
Referenced by Blocksqp(), filterLineSearch(), init(), secondOrderCorrection(), and serialize_body().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_nk
Definition at line 1307 of file function_internal.hpp.
Referenced by casadi::FunctionBuffer::_eval(), casadi::GenericExternal::any_symbol_found(), casadi::FunctionInternal::eval_gen(), casadi::FunctionInternal::finalize(), casadi::FunctionInternal::FunctionInternal(), and casadi::GenericExternal::init_external().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_1nk
Definition at line 93 of file nlpsol_impl.hpp.
Referenced by casadi::Nlpsol::init(), casadi::Nlpsol::Nlpsol(), and casadi::Nlpsol::serialize_body().
| Sparsity casadi::Blocksqp::exact_hess_lag_sp_ |
Definition at line 203 of file blocksqp.hpp.
Referenced by Blocksqp(), calcHessianUpdateExact(), init(), serialize_body(), and set_work().
| casadi_int casadi::Blocksqp::fallback_scaling_ |
Definition at line 358 of file blocksqp.hpp.
Referenced by Blocksqp(), calcHessianUpdate(), calcHessianUpdateExact(), computeNextHessian(), init(), printInfo(), and serialize_body().
| casadi_int casadi::Blocksqp::fallback_update_ |
Definition at line 367 of file blocksqp.hpp.
Referenced by Blocksqp(), calcHessianUpdate(), calcHessianUpdateExact(), computeNextHessian(), init(), printInfo(), and serialize_body().
|
inherited |
Definition at line 75 of file nlpsol_impl.hpp.
Referenced by casadi::Nlpsol::callback(), casadi::Nlpsol::init(), casadi::SLEQPInterface::init(), casadi::BonminInterface::intermediate_callback(), casadi::IpoptInterface::intermediate_callback(), casadi::Nlpsol::Nlpsol(), casadi::Nlpsol::serialize_body(), casadi::SLEQPInterface::set_work(), casadi::SLEQPInterface::solve(), and casadi::WorhpInterface::solve().
|
inherited |
Definition at line 1379 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::forward(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::generate_options(), casadi::FmuFunction::init(), casadi::FunctionInternal::init(), and casadi::FunctionInternal::serialize_body().
|
inherited |
Definition at line 1373 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::forward(), casadi::FunctionInternal::generate_options(), and casadi::FunctionInternal::init().
|
inherited |
Definition at line 1376 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::init(), and casadi::FunctionInternal::serialize_body().
|
inherited |
Definition at line 1401 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::forward(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::generate_options(), casadi::FunctionInternal::init(), and casadi::FunctionInternal::serialize_body().
| double casadi::Blocksqp::gamma_f_ |
Definition at line 380 of file blocksqp.hpp.
Referenced by augmentFilter(), Blocksqp(), filterLineSearch(), init(), pairInFilter(), secondOrderCorrection(), and serialize_body().
| double casadi::Blocksqp::gamma_theta_ |
Definition at line 379 of file blocksqp.hpp.
Referenced by augmentFilter(), Blocksqp(), filterLineSearch(), init(), pairInFilter(), secondOrderCorrection(), and serialize_body().
| bool casadi::Blocksqp::globalization_ |
Definition at line 347 of file blocksqp.hpp.
Referenced by Blocksqp(), init(), printInfo(), run(), serialize_body(), and solveQP().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_no
Definition at line 1327 of file function_internal.hpp.
Referenced by casadi::CodeGenerator::add_dependency(), casadi::FunctionInternal::FunctionInternal(), casadi::Call::has_refcount(), casadi::External::init(), casadi::MXFunction::init(), casadi::OsqpInterface::OsqpInterface(), and casadi::FunctionInternal::serialize_body().
| casadi_int casadi::Blocksqp::hess_damp_ |
Definition at line 364 of file blocksqp.hpp.
Referenced by Blocksqp(), calcBFGS(), computeNextHessian(), init(), printInfo(), and serialize_body().
| double casadi::Blocksqp::hess_damp_fac_ |
Definition at line 365 of file blocksqp.hpp.
Referenced by Blocksqp(), calcBFGS(), init(), and serialize_body().
| casadi_int casadi::Blocksqp::hess_lim_mem_ |
Definition at line 368 of file blocksqp.hpp.
Referenced by Blocksqp(), calcHessianUpdateExact(), computeNextHessian(), init(), printInfo(), run(), serialize_body(), solve(), and solveQP().
| casadi_int casadi::Blocksqp::hess_memsize_ |
Definition at line 369 of file blocksqp.hpp.
Referenced by Blocksqp(), calcHessianUpdateLimitedMemory(), init(), reset_sqp(), resetHessian(), serialize_body(), set_work(), solve(), and updateDeltaGamma().
| casadi_int casadi::Blocksqp::hess_scaling_ |
Definition at line 357 of file blocksqp.hpp.
Referenced by Blocksqp(), init(), printInfo(), run(), and serialize_body().
| casadi_int casadi::Blocksqp::hess_update_ |
Definition at line 366 of file blocksqp.hpp.
Referenced by Blocksqp(), init(), printInfo(), reset_sqp(), run(), serialize_body(), set_work(), and solveQP().
| Sparsity casadi::Blocksqp::Hsp_ |
Definition at line 202 of file blocksqp.hpp.
Referenced by Blocksqp(), init(), and serialize_body().
|
staticinherited |
Definition at line 290 of file nlpsol_impl.hpp.
| double casadi::Blocksqp::ini_hess_diag_ |
Definition at line 360 of file blocksqp.hpp.
Referenced by Blocksqp(), calcInitialHessian(), init(), and serialize_body().
|
inherited |
Definition at line 1370 of file function_internal.hpp.
Referenced by casadi::Nlpsol::check_inputs(), casadi::Conic::eval(), casadi::SqicInterface::evaluate(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::generate_options(), casadi::FunctionInternal::init(), casadi::FunctionInternal::serialize_body(), and casadi::GurobiInterface::solve().
|
inherited |
Definition at line 1269 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::codegen_meta(), casadi::FunctionInternal::definition(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::fwd_seed(), casadi::FunctionInternal::init(), casadi::Map::init(), casadi::MapSum::init(), casadi::FunctionInternal::jac_sparsity(), casadi::FunctionInternal::serialize_body(), and casadi::FunctionInternal::wrap().
|
inherited |
Definition at line 1269 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::codegen_meta(), casadi::FunctionInternal::definition(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::init(), casadi::Map::init(), casadi::MapSum::init(), casadi::FunctionInternal::jac_sparsity(), casadi::FunctionInternal::serialize_body(), casadi::FunctionInternal::symbolicAdjSeed(), and casadi::FunctionInternal::wrap().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_1nk
Definition at line 95 of file nlpsol_impl.hpp.
Referenced by casadi::Nlpsol::callback(), casadi::Nlpsol::init(), casadi::BonminInterface::intermediate_callback(), casadi::IpoptInterface::intermediate_callback(), casadi::Nlpsol::Nlpsol(), casadi::Nlpsol::serialize_body(), and casadi::SLEQPInterface::solve().
|
inherited |
Definition at line 1357 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::adjViaJac(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::fwdViaJac(), casadi::FunctionInternal::generate_options(), casadi::FunctionInternal::init(), and casadi::FunctionInternal::serialize_body().
|
mutableinherited |
Definition at line 1338 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::jac_sparsity(), and casadi::FunctionInternal::set_jac_sparsity().
|
inherited |
Definition at line 1401 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::generate_options(), casadi::BlazingSplineFunction::get_jacobian(), casadi::FunctionInternal::init(), casadi::FunctionInternal::jacobian(), and casadi::FunctionInternal::serialize_body().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_nf
Definition at line 1280 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::finalize(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::generate_options(), casadi::FunctionInternal::init(), casadi::JitFunction::JitFunction(), casadi::OracleFunction::OracleFunction(), casadi::FunctionInternal::serialize_body(), casadi::OracleFunction::serialize_body(), and casadi::FunctionInternal::~FunctionInternal().
|
inherited |
Definition at line 1297 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::finalize(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::generate_options(), casadi::FunctionInternal::init(), and casadi::FunctionInternal::serialize_body().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_ng
Definition at line 1285 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::generate_options(), casadi::FunctionInternal::init(), casadi::FunctionInternal::serialize_body(), and casadi::FunctionInternal::~FunctionInternal().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_ni
Definition at line 1295 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::finalize(), and casadi::FunctionInternal::~FunctionInternal().
|
inherited |
Definition at line 1354 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::finalize(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::generate_options(), casadi::FunctionInternal::init(), casadi::Scpgen::init(), casadi::OracleFunction::jit_dependencies(), casadi::FunctionInternal::serialize_body(), and casadi::FunctionInternal::~FunctionInternal().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_nh
Definition at line 1290 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::generate_options(), casadi::FunctionInternal::init(), casadi::OracleFunction::OracleFunction(), casadi::FunctionInternal::serialize_body(), and casadi::OracleFunction::serialize_body().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_nj
Definition at line 1302 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::finalize(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::generate_options(), casadi::FunctionInternal::init(), and casadi::FunctionInternal::serialize_body().
| double casadi::Blocksqp::kappa_f_ |
Definition at line 382 of file blocksqp.hpp.
Referenced by Blocksqp(), init(), kktErrorReduction(), and serialize_body().
| double casadi::Blocksqp::kappa_minus_ |
Definition at line 388 of file blocksqp.hpp.
Referenced by Blocksqp(), init(), and serialize_body().
| double casadi::Blocksqp::kappa_plus_ |
Definition at line 389 of file blocksqp.hpp.
Referenced by Blocksqp(), init(), and serialize_body().
| double casadi::Blocksqp::kappa_plus_max_ |
Definition at line 390 of file blocksqp.hpp.
Referenced by Blocksqp(), init(), and serialize_body().
| double casadi::Blocksqp::kappa_soc_ |
Definition at line 381 of file blocksqp.hpp.
Referenced by Blocksqp(), init(), secondOrderCorrection(), and serialize_body().
|
mutableinherited |
Definition at line 109 of file nlpsol_impl.hpp.
Referenced by casadi::Nlpsol::kkt().
| std::string casadi::Blocksqp::linsol_plugin_ |
Definition at line 336 of file blocksqp.hpp.
Referenced by Blocksqp(), init(), init_mem(), and serialize_body().
| casadi_int casadi::Blocksqp::max_consec_reduced_steps_ |
Definition at line 350 of file blocksqp.hpp.
Referenced by Blocksqp(), init(), run(), and serialize_body().
| casadi_int casadi::Blocksqp::max_consec_skipped_updates_ |
Definition at line 351 of file blocksqp.hpp.
Referenced by Blocksqp(), calcHessianUpdate(), calcHessianUpdateLimitedMemory(), init(), and serialize_body().
| casadi_int casadi::Blocksqp::max_conv_qp_ |
Definition at line 374 of file blocksqp.hpp.
Referenced by Blocksqp(), init(), serialize_body(), and solveQP().
|
inherited |
Definition at line 1389 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::generate_options(), casadi::FunctionInternal::init(), and casadi::FunctionInternal::serialize_body().
| casadi_int casadi::Blocksqp::max_it_qp_ |
Definition at line 352 of file blocksqp.hpp.
Referenced by Blocksqp(), init(), serialize_body(), and solveQP().
| casadi_int casadi::Blocksqp::max_iter_ |
Definition at line 353 of file blocksqp.hpp.
Referenced by Blocksqp(), init(), serialize_body(), and solve().
| casadi_int casadi::Blocksqp::max_line_search_ |
Definition at line 349 of file blocksqp.hpp.
Referenced by Blocksqp(), filterLineSearch(), init(), and serialize_body().
|
inherited |
Definition at line 1367 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::call_forward(), casadi::FunctionInternal::call_reverse(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::generate_options(), casadi::FunctionInternal::init(), casadi::FunctionInternal::serialize_body(), casadi::FunctionInternal::wrap(), and casadi::FunctionInternal::wrap_as_needed().
|
protectedinherited |
Definition at line 93 of file oracle_function.hpp.
Referenced by casadi::OracleFunction::calc_function(), casadi::OracleFunction::finalize(), casadi::OracleFunction::init(), casadi::KnitroInterface::init(), casadi::OracleFunction::init_mem(), casadi::OracleFunction::join_results(), casadi::OracleFunction::OracleFunction(), casadi::OracleFunction::serialize_body(), and casadi::OracleFunction::set_temp().
| casadi_int casadi::Blocksqp::max_soc_iter_ |
Definition at line 378 of file blocksqp.hpp.
Referenced by Blocksqp(), init(), secondOrderCorrection(), and serialize_body().
| double casadi::Blocksqp::max_time_qp_ |
Definition at line 359 of file blocksqp.hpp.
Referenced by Blocksqp(), init(), serialize_body(), and solveQP().
|
static |
Definition at line 193 of file blocksqp.hpp.
Referenced by casadi::casadi_register_nlpsol_blocksqp().
|
inherited |
Definition at line 106 of file nlpsol_impl.hpp.
Referenced by casadi::Nlpsol::init(), casadi::Nlpsol::Nlpsol(), casadi::Nlpsol::serialize_body(), and casadi::KnitroInterface::solve().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_1nk
Definition at line 99 of file nlpsol_impl.hpp.
Referenced by casadi::Nlpsol::get_forward(), casadi::Nlpsol::get_reverse(), casadi::Nlpsol::init(), casadi::Nlpsol::Nlpsol(), and casadi::Nlpsol::serialize_body().
|
protectedinherited |
Definition at line 107 of file oracle_function.hpp.
Referenced by casadi::OracleFunction::finalize(), casadi::OracleFunction::init(), casadi::OracleFunction::OracleFunction(), and casadi::OracleFunction::serialize_body().
|
inherited |
Definition at line 1266 of file function_internal.hpp.
Referenced by casadi::SXFunction::ad_forward(), casadi::Rootfinder::ad_reverse(), casadi::MXFunction::ad_reverse(), casadi::SXFunction::ad_reverse(), casadi::FunctionInternal::all_scalar(), casadi::KinsolInterface::bjac(), casadi::FunctionInternal::call_forward(), casadi::FunctionInternal::call_gen(), casadi::FunctionInternal::call_reverse(), casadi::SXFunction::call_setup(), casadi::FunctionInternal::check_arg(), casadi::JitFunction::codegen_body(), casadi::Map::codegen_body(), casadi::OmpMap::codegen_body(), casadi::MapSum::codegen_body(), casadi::MXFunction::codegen_body(), casadi::Switch::codegen_body(), casadi::SXFunction::codegen_body(), casadi::FastNewton::codegen_body(), casadi::FunctionInternal::codegen_meta(), casadi::FunctionInternal::convert_arg(), casadi::FunctionInternal::definition(), casadi::KinsolInterface::djac(), casadi::FunctionInternal::dm_in(), casadi::FunctionInternal::eval(), casadi::OmpMap::eval(), casadi::MXFunction::eval(), casadi::Switch::eval(), casadi::FunctionInternal::eval_gen(), casadi::Map::eval_gen(), casadi::MapSum::eval_gen(), casadi::MXFunction::eval_mx(), casadi::SXFunction::eval_mx(), casadi::Switch::eval_sx(), casadi::SXFunction::export_code_body(), casadi::CallbackInternal::finalize(), casadi::FmuFunction::FmuFunction(), casadi::FunctionInternal::forward(), casadi::KinsolInterface::func(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::fwd_seed(), casadi::FunctionInternal::generate_in(), casadi::GenericExternal::get_jac_sparsity(), casadi::GenericExternal::has_jac_sparsity(), casadi::FunctionInternal::init(), casadi::MXFunction::init(), casadi::Switch::init(), casadi::SXFunction::init(), casadi::ImplicitToNlp::init(), casadi::FunctionInternal::jac_sparsity(), casadi::FunctionInternal::jacobian(), casadi::KinsolInterface::jtimes(), casadi::FunctionInternal::mapsum_mx(), casadi::FunctionInternal::matching_arg(), casadi::FunctionInternal::mx_in(), casadi::FunctionInternal::nnz_in(), casadi::FunctionInternal::numel_in(), casadi::FunctionInternal::nz_in(), casadi::SXFunction::print_arg(), casadi::FunctionInternal::print_dimensions(), casadi::FunctionInternal::print_in(), casadi::FunctionInternal::project_arg(), casadi::KinsolInterface::psetup(), casadi::FunctionInternal::reverse(), casadi::FmuFunction::serialize_body(), casadi::FunctionInternal::set_jac_sparsity(), casadi::Rootfinder::set_work(), casadi::QpToNlp::solve(), casadi::KinsolInterface::solve(), casadi::FastNewton::solve(), casadi::ImplicitToNlp::solve(), casadi::Newton::solve(), casadi::FunctionInternal::sp_forward(), casadi::Integrator::sp_forward(), casadi::MXFunction::sp_forward(), casadi::Rootfinder::sp_forward(), casadi::FunctionInternal::sp_reverse(), casadi::Integrator::sp_reverse(), casadi::Map::sp_reverse(), casadi::MapSum::sp_reverse(), casadi::MXFunction::sp_reverse(), casadi::Rootfinder::sp_reverse(), and casadi::FunctionInternal::sx_in().
|
inherited |
Definition at line 1266 of file function_internal.hpp.
Referenced by casadi::Rootfinder::ad_forward(), casadi::MXFunction::ad_forward(), casadi::SXFunction::ad_forward(), casadi::Rootfinder::ad_reverse(), casadi::SXFunction::ad_reverse(), casadi::FunctionInternal::all_scalar(), casadi::KinsolInterface::bjac(), casadi::FunctionInternal::call(), casadi::FunctionInternal::call_forward(), casadi::FunctionInternal::call_gen(), casadi::FunctionInternal::call_reverse(), casadi::SXFunction::call_setup(), casadi::FunctionInternal::check_res(), casadi::JitFunction::codegen_body(), casadi::Map::codegen_body(), casadi::OmpMap::codegen_body(), casadi::MapSum::codegen_body(), casadi::MXFunction::codegen_body(), casadi::Switch::codegen_body(), casadi::SXFunction::codegen_body(), casadi::FastNewton::codegen_body(), casadi::FunctionInternal::codegen_meta(), casadi::FunctionInternal::convert_res(), casadi::FunctionInternal::definition(), casadi::KinsolInterface::djac(), casadi::FunctionInternal::dm_out(), casadi::FunctionInternal::eval(), casadi::OmpMap::eval(), casadi::MXFunction::eval(), casadi::Switch::eval(), casadi::FunctionInternal::eval_gen(), casadi::Map::eval_gen(), casadi::MapSum::eval_gen(), casadi::Switch::eval_sx(), casadi::CallbackInternal::finalize(), casadi::FmuFunction::FmuFunction(), casadi::FunctionInternal::forward(), casadi::KinsolInterface::func(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::generate_out(), casadi::LinearInterpolantJac::get_jacobian(), casadi::FunctionInternal::init(), casadi::MapSum::init(), casadi::Nlpsol::init(), casadi::Switch::init(), casadi::FunctionInternal::jac_sparsity(), casadi::FunctionInternal::jacobian(), casadi::FunctionInternal::mapsum_mx(), casadi::FunctionInternal::matching_res(), casadi::FunctionInternal::mx_out(), casadi::FunctionInternal::nnz_out(), casadi::FunctionInternal::numel_out(), casadi::FunctionInternal::nz_out(), casadi::FunctionInternal::print_dimensions(), casadi::FunctionInternal::print_out(), casadi::KinsolInterface::psetup(), casadi::FunctionInternal::reverse(), casadi::FmuFunction::serialize_body(), casadi::FunctionInternal::set_jac_sparsity(), casadi::Rootfinder::set_work(), casadi::QpToNlp::solve(), casadi::KinsolInterface::solve(), casadi::FastNewton::solve(), casadi::ImplicitToNlp::solve(), casadi::Newton::solve(), casadi::FunctionInternal::sp_forward(), casadi::Integrator::sp_forward(), casadi::MXFunction::sp_forward(), casadi::Rootfinder::sp_forward(), casadi::FunctionInternal::sp_reverse(), casadi::Integrator::sp_reverse(), casadi::Map::sp_reverse(), casadi::MapSum::sp_reverse(), casadi::MXFunction::sp_reverse(), casadi::Rootfinder::sp_reverse(), and casadi::FunctionInternal::sx_out().
|
inherited |
Definition at line 246 of file function_internal.hpp.
Referenced by casadi::MXFunction::ad_forward(), casadi::SXFunction::ad_forward(), casadi::MXFunction::ad_reverse(), casadi::SXFunction::ad_reverse(), casadi::Integrator::augmented_dae(), casadi::OracleFunction::calc_function(), casadi::FunctionInternal::call_forward(), casadi::FunctionInternal::call_reverse(), casadi::FunctionInternal::codegen_body(), casadi::External::codegen_body(), casadi::External::codegen_checkout(), casadi::External::codegen_declarations(), casadi::MXFunction::codegen_declarations(), casadi::SXFunction::codegen_declarations(), casadi::External::codegen_decref(), casadi::External::codegen_incref(), casadi::FunctionInternal::codegen_meta(), casadi::FunctionInternal::codegen_name(), casadi::External::codegen_release(), casadi::FunctionInternal::codegen_sparsities(), casadi::ProtoFunction::construct(), casadi::OracleFunction::create_function(), casadi::FunctionInternal::definition(), casadi::FunctionInternal::eval(), casadi::MXFunction::eval(), casadi::SXFunction::eval(), casadi::FunctionInternal::eval_mx(), casadi::MXFunction::eval_mx(), casadi::SXFunction::eval_mx(), casadi::SXFunction::eval_sx(), casadi::FmuFunction::factory(), casadi::FunctionInternal::finalize(), casadi::FunctionInternal::forward(), casadi::FunctionInternal::FunctionInternal(), casadi::Integrator::get_forward(), casadi::Integrator::get_forward_dae(), casadi::Map::get_function(), casadi::MapSum::get_function(), casadi::OracleFunction::get_function(), casadi::GenericExternal::get_jac_sparsity(), casadi::BlazingSplineFunction::get_jacobian(), casadi::FunctionInternal::get_n_in(), casadi::External::get_n_in(), casadi::FunctionInternal::get_n_out(), casadi::External::get_n_out(), casadi::FunctionInternal::get_name_in(), casadi::External::get_name_in(), casadi::FunctionInternal::get_name_out(), casadi::External::get_name_out(), casadi::FunctionInternal::get_partition(), casadi::Integrator::get_reverse(), casadi::FunctionInternal::get_sparsity_in(), casadi::GenericExternal::get_sparsity_in(), casadi::FunctionInternal::get_sparsity_out(), casadi::GenericExternal::get_sparsity_out(), casadi::FunctionInternal::get_stats(), casadi::External::has_forward(), casadi::GenericExternal::has_jac_sparsity(), casadi::External::has_jacobian(), casadi::External::has_reverse(), casadi::External::init(), casadi::FunctionInternal::init(), casadi::MXFunction::init(), casadi::SXFunction::init(), casadi::CvodesInterface::init(), casadi::IdasInterface::init(), casadi::External::init_external(), casadi::GenericExternal::init_external(), casadi::FunctionInternal::jac_is_symm(), casadi::FunctionInternal::jacobian(), casadi::FunctionInternal::map(), casadi::OracleFunction::monitored(), casadi::MXFunction::print_arg(), casadi::SXFunction::print_arg(), casadi::FunctionInternal::print_in(), casadi::FunctionInternal::print_out(), casadi::MXFunction::print_res(), casadi::SXFunction::print_res(), casadi::ProtoFunction::print_time(), casadi::ProtoFunction::ProtoFunction(), casadi::CvodesInterface::reset(), casadi::IdasInterface::reset(), casadi::IdasInterface::resetB(), casadi::FunctionInternal::reverse(), casadi::ProtoFunction::serialize_body(), casadi::GurobiInterface::solve(), casadi::SnoptInterface::solve(), casadi::Integrator::sp_forward(), casadi::Integrator::sp_reverse(), casadi::FunctionInternal::wrap(), and casadi::FunctionInternal::wrap_as_needed().
|
inherited |
Definition at line 1275 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::check_arg(), casadi::JitFunction::codegen_body(), casadi::FunctionInternal::codegen_meta(), casadi::FunctionInternal::convert_arg(), casadi::FunctionInternal::definition(), casadi::FunctionInternal::diff_prefix(), casadi::FunctionInternal::eval_gen(), casadi::FmuFunction::FmuFunction(), casadi::FunctionInternal::forward(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::fwd_seed(), casadi::FmuFunction::get_stats(), casadi::FunctionInternal::init(), casadi::FunctionInternal::jacobian(), casadi::JitFunction::JitFunction(), casadi::FunctionInternal::mx_in(), casadi::FunctionInternal::print_dimensions(), casadi::FunctionInternal::print_in(), casadi::FunctionInternal::reverse(), casadi::FunctionInternal::serialize_body(), casadi::FunctionInternal::signature_unrolled(), casadi::FunctionInternal::sx_in(), casadi::FunctionInternal::wrap(), casadi::FunctionInternal::wrap_as_needed(), and casadi::XFunction< DerivedType, MatType, NodeType >::XFunction().
|
inherited |
Definition at line 1275 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::check_res(), casadi::JitFunction::codegen_body(), casadi::FunctionInternal::codegen_meta(), casadi::FunctionInternal::convert_res(), casadi::FunctionInternal::definition(), casadi::FunctionInternal::diff_prefix(), casadi::FunctionInternal::eval_gen(), casadi::FmuFunction::FmuFunction(), casadi::FunctionInternal::forward(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::init(), casadi::FunctionInternal::jacobian(), casadi::JitFunction::JitFunction(), casadi::FunctionInternal::mx_out(), casadi::FunctionInternal::print_dimensions(), casadi::FunctionInternal::print_out(), casadi::FunctionInternal::reverse(), casadi::FunctionInternal::serialize_body(), casadi::FunctionInternal::signature_unrolled(), casadi::FunctionInternal::sx_out(), casadi::FunctionInternal::wrap(), casadi::FunctionInternal::wrap_as_needed(), and casadi::XFunction< DerivedType, MatType, NodeType >::XFunction().
| casadi_int casadi::Blocksqp::nblocks_ |
Definition at line 196 of file blocksqp.hpp.
Referenced by Blocksqp(), calcHessianUpdate(), calcHessianUpdateExact(), calcHessianUpdateLimitedMemory(), calcInitialHessian(), computeNextHessian(), convertHessian(), init(), printProgress(), reset_sqp(), resetHessian(), serialize_body(), set_work(), solve(), and solveQP().
|
inherited |
Definition at line 1263 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::eval_mx(), casadi::MXFunction::eval_mx(), casadi::SXFunction::eval_mx(), casadi::FunctionInternal::eval_sx(), casadi::MXFunction::eval_sx(), casadi::SXFunction::eval_sx(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::generate_options(), casadi::FunctionInternal::init(), and casadi::FunctionInternal::serialize_body().
|
inherited |
Definition at line 69 of file nlpsol_impl.hpp.
Referenced by acceptStep(), casadi::AlpaqaProblem::AlpaqaProblem(), casadi::BonminUserClass::BonminUserClass(), calcOptTol(), casadi::Feasiblesqpmethod::codegen_body(), casadi::Sqpmethod::codegen_body(), casadi::Nlpsol::codegen_body_enter(), casadi::Nlpsol::codegen_body_exit(), casadi::Feasiblesqpmethod::codegen_feasibility_iterations(), casadi::Sqpmethod::codegen_qp_ela_solve(), casadi::Sqpmethod::codegen_solve_elastic_mode(), casadi::Feasiblesqpmethod::codegen_step_update(), casadi::Nlpsol::eval(), casadi::Scpgen::eval_vec(), evaluate(), casadi::Feasiblesqpmethod::feasibility_iterations(), feasibilityRestorationPhase(), casadi::IpoptUserClass::finalize_metadata(), casadi::BonminInterface::finalize_solution(), casadi::IpoptInterface::finalize_solution(), casadi::BonminInterface::get_bounds_info(), casadi::BonminUserClass::get_bounds_info(), casadi::IpoptUserClass::get_bounds_info(), casadi::IpoptInterface::get_bounds_info(), casadi::Nlpsol::get_forward(), casadi::BonminInterface::get_nlp_info(), casadi::IpoptInterface::get_nlp_info(), casadi::Nlpsol::get_reverse(), casadi::BonminInterface::get_starting_point(), casadi::BonminUserClass::get_starting_point(), casadi::IpoptUserClass::get_starting_point(), casadi::IpoptInterface::get_starting_point(), casadi::Nlpsol::init(), casadi::AlpaqaInterface::init(), casadi::AmplInterface::init(), init(), casadi::BonminInterface::init(), casadi::FatropInterface::init(), casadi::IpoptInterface::init(), casadi::KnitroInterface::init(), casadi::SLEQPInterface::init(), casadi::SnoptInterface::init(), casadi::Feasiblesqpmethod::init(), casadi::Qrsqp::init(), casadi::Scpgen::init(), casadi::Sqpmethod::init(), casadi::IpoptInterface::init_mem(), casadi::SnoptInterface::init_mem(), casadi::BonminInterface::intermediate_callback(), casadi::IpoptInterface::intermediate_callback(), casadi::IpoptUserClass::IpoptUserClass(), kktErrorReduction(), casadi::Scpgen::line_search(), lInfConstraintNorm(), casadi::Nlpsol::Nlpsol(), casadi::Scpgen::primalInfeasibility(), reduceSOCStepsize(), reset_sqp(), secondOrderCorrection(), casadi::Nlpsol::serialize_body(), set_work(), casadi::BonminInterface::set_work(), casadi::IpoptInterface::set_work(), casadi::KnitroInterface::set_work(), casadi::SLEQPInterface::set_work(), casadi::SnoptInterface::set_work(), casadi::WorhpInterface::set_work(), casadi::Qrsqp::set_work(), casadi::Scpgen::set_work(), casadi::AlpaqaInterface::solve(), casadi::AmplInterface::solve(), solve(), casadi::BonminInterface::solve(), casadi::IpoptInterface::solve(), casadi::KnitroInterface::solve(), casadi::SnoptInterface::solve(), casadi::WorhpInterface::solve(), casadi::Feasiblesqpmethod::solve(), casadi::Qrsqp::solve(), casadi::Scpgen::solve(), casadi::Sqpmethod::solve(), casadi::Sqpmethod::solve_ela_QP(), casadi::Sqpmethod::solve_elastic_mode(), casadi::Scpgen::solve_qp(), solveQP(), casadi::Feasiblesqpmethod::step_update(), and updateStepBounds().
| double casadi::Blocksqp::nlinfeastol_ |
Definition at line 343 of file blocksqp.hpp.
Referenced by Blocksqp(), calcOptTol(), feasibilityRestorationPhase(), init(), pairInFilter(), run(), and serialize_body().
| casadi_int casadi::Blocksqp::nnz_H_ |
Definition at line 199 of file blocksqp.hpp.
Referenced by Blocksqp(), init(), serialize_body(), and set_work().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_1nk
Definition at line 100 of file nlpsol_impl.hpp.
Referenced by casadi::Nlpsol::init(), casadi::Nlpsol::Nlpsol(), and casadi::Nlpsol::serialize_body().
|
inherited |
Definition at line 72 of file nlpsol_impl.hpp.
Referenced by casadi::Feasiblesqpmethod::codegen_body(), casadi::Nlpsol::codegen_body_enter(), casadi::Nlpsol::codegen_body_exit(), casadi::Nlpsol::eval(), feasibilityRestorationPhase(), casadi::Nlpsol::init(), casadi::AlpaqaInterface::init(), casadi::Scpgen::init(), casadi::Nlpsol::Nlpsol(), and casadi::Nlpsol::serialize_body().
|
inherited |
Definition at line 66 of file nlpsol_impl.hpp.
Referenced by acceptStep(), casadi::AlpaqaProblem::AlpaqaProblem(), casadi::Feasiblesqpmethod::anderson_acc_init_memory(), casadi::Feasiblesqpmethod::anderson_acc_step_update(), casadi::Feasiblesqpmethod::anderson_acc_update_memory(), casadi::BonminUserClass::BonminUserClass(), casadi::Sqpmethod::calc_gamma_1(), calcHessianUpdateLimitedMemory(), calcLagrangeGradient(), calcOptTol(), casadi::Nlpsol::callback(), casadi::Nlpsol::check_inputs(), casadi::Feasiblesqpmethod::codegen_body(), casadi::Sqpmethod::codegen_body(), casadi::Nlpsol::codegen_body_enter(), casadi::Nlpsol::codegen_body_exit(), casadi::Sqpmethod::codegen_calc_gamma_1(), casadi::Feasiblesqpmethod::codegen_eval_m_k(), casadi::Feasiblesqpmethod::codegen_feasibility_iterations(), casadi::Sqpmethod::codegen_qp_ela_solve(), casadi::Feasiblesqpmethod::codegen_qp_solve(), casadi::Sqpmethod::codegen_qp_solve(), casadi::Sqpmethod::codegen_solve_elastic_mode(), casadi::Feasiblesqpmethod::codegen_step_update(), casadi::Feasiblesqpmethod::codegen_tr_update(), convertHessian(), casadi::Scpgen::dualInfeasibility(), casadi::Nlpsol::eval(), casadi::Scpgen::eval_exp(), casadi::Feasiblesqpmethod::eval_m_k(), casadi::Scpgen::eval_mat(), casadi::Scpgen::eval_res(), casadi::Scpgen::eval_vec(), evaluate(), casadi::Feasiblesqpmethod::feasibility_iterations(), feasibilityRestorationHeuristic(), feasibilityRestorationPhase(), filterLineSearch(), casadi::IpoptUserClass::finalize_metadata(), casadi::BonminInterface::finalize_solution(), casadi::IpoptInterface::finalize_solution(), fullstep(), casadi::BonminInterface::get_bounds_info(), casadi::BonminUserClass::get_bounds_info(), casadi::IpoptUserClass::get_bounds_info(), casadi::IpoptInterface::get_bounds_info(), casadi::Nlpsol::get_forward(), casadi::BonminInterface::get_nlp_info(), casadi::IpoptInterface::get_nlp_info(), casadi::Nlpsol::get_reverse(), casadi::BonminInterface::get_starting_point(), casadi::BonminUserClass::get_starting_point(), casadi::IpoptUserClass::get_starting_point(), casadi::IpoptInterface::get_starting_point(), casadi::Nlpsol::init(), casadi::AlpaqaInterface::init(), casadi::AmplInterface::init(), init(), casadi::BonminInterface::init(), casadi::FatropInterface::init(), casadi::IpoptInterface::init(), casadi::KnitroInterface::init(), casadi::SLEQPInterface::init(), casadi::SnoptInterface::init(), casadi::WorhpInterface::init(), casadi::Feasiblesqpmethod::init(), casadi::Qrsqp::init(), casadi::Scpgen::init(), casadi::Sqpmethod::init(), casadi::IpoptInterface::init_mem(), casadi::SnoptInterface::init_mem(), casadi::BonminInterface::intermediate_callback(), casadi::IpoptInterface::intermediate_callback(), casadi::IpoptUserClass::IpoptUserClass(), kktErrorReduction(), casadi::Scpgen::line_search(), lInfConstraintNorm(), casadi::Nlpsol::Nlpsol(), casadi::Scpgen::primalInfeasibility(), printProgress(), reduceSOCStepsize(), casadi::Scpgen::regularize(), reset_sqp(), resetHessian(), secondOrderCorrection(), casadi::Nlpsol::serialize_body(), set_work(), casadi::BonminInterface::set_work(), casadi::IpoptInterface::set_work(), casadi::KnitroInterface::set_work(), casadi::SLEQPInterface::set_work(), casadi::SnoptInterface::set_work(), casadi::WorhpInterface::set_work(), casadi::Qrsqp::set_work(), casadi::Scpgen::set_work(), casadi::AlpaqaInterface::solve(), casadi::AmplInterface::solve(), solve(), casadi::BonminInterface::solve(), casadi::IpoptInterface::solve(), casadi::KnitroInterface::solve(), casadi::SLEQPInterface::solve(), casadi::SnoptInterface::solve(), casadi::WorhpInterface::solve(), casadi::Feasiblesqpmethod::solve(), casadi::Qrsqp::solve(), casadi::Scpgen::solve(), casadi::Sqpmethod::solve(), casadi::Sqpmethod::solve_ela_QP(), casadi::Sqpmethod::solve_elastic_mode(), casadi::Feasiblesqpmethod::solve_LP(), casadi::Feasiblesqpmethod::solve_QP(), casadi::Qrsqp::solve_QP(), casadi::Scpgen::solve_qp(), casadi::Sqpmethod::solve_QP(), solveQP(), casadi::Feasiblesqpmethod::step_update(), casadi::Feasiblesqpmethod::tr_update(), updateDeltaGamma(), updateStepBounds(), and casadi::SnoptInterface::userfun().
| double casadi::Blocksqp::obj_lo_ |
Definition at line 393 of file blocksqp.hpp.
Referenced by Blocksqp(), init(), initializeFilter(), and serialize_body().
| double casadi::Blocksqp::obj_up_ |
Definition at line 394 of file blocksqp.hpp.
Referenced by Blocksqp(), feasibilityRestorationPhase(), filterLineSearch(), fullstep(), init(), kktErrorReduction(), secondOrderCorrection(), and serialize_body().
|
static |
Definition at line 169 of file blocksqp.hpp.
Referenced by casadi::casadi_register_nlpsol_blocksqp().
| double casadi::Blocksqp::opttol_ |
Definition at line 342 of file blocksqp.hpp.
Referenced by Blocksqp(), calcOptTol(), feasibilityRestorationPhase(), init(), and serialize_body().
|
protectedinherited |
Definition at line 83 of file oracle_function.hpp.
Referenced by casadi::Rootfinder::ad_forward(), casadi::Rootfinder::ad_reverse(), casadi::Integrator::augmented_dae(), casadi::OracleFunction::create_function(), casadi::Nlpsol::disp_more(), casadi::OracleFunction::expand(), casadi::KinsolInterface::func(), casadi::OracleFunction::generate_dependencies(), casadi::Integrator::get_forward_dae(), casadi::KinsolInterface::get_jtimes(), casadi::Rootfinder::get_name_in(), casadi::Rootfinder::get_name_out(), casadi::Nlpsol::get_sparsity_in(), casadi::Nlpsol::get_sparsity_out(), casadi::Rootfinder::get_sparsity_out(), casadi::Integrator::init(), casadi::Nlpsol::init(), casadi::OracleFunction::init(), casadi::Rootfinder::init(), casadi::AlpaqaInterface::init(), init(), casadi::BonminInterface::init(), casadi::IpoptInterface::init(), casadi::KnitroInterface::init(), casadi::FastNewton::init(), casadi::ImplicitToNlp::init(), casadi::Newton::init(), casadi::Nlpsol::kkt(), casadi::OracleFunction::OracleFunction(), casadi::OracleFunction::serialize_body(), casadi::ImplicitToNlp::set_work(), casadi::KinsolInterface::solve(), casadi::ImplicitToNlp::solve(), casadi::Rootfinder::sp_forward(), and casadi::Rootfinder::sp_reverse().
|
inherited |
Definition at line 63 of file nlpsol_impl.hpp.
Referenced by casadi::Nlpsol::init(), casadi::FatropInterface::set_fatrop_prob(), casadi::MadnlpInterface::set_madnlp_prob(), and casadi::Nlpsol::set_work().
|
protectedinherited |
Definition at line 114 of file oracle_function.hpp.
Referenced by casadi::OracleFunction::finalize(), casadi::OracleFunction::init(), and casadi::OracleFunction::OracleFunction().
|
inherited |
Definition at line 1386 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::change_option(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::generate_options(), casadi::FunctionInternal::init(), casadi::MXFunction::print_arg(), casadi::SXFunction::print_arg(), casadi::FunctionInternal::print_in(), casadi::FunctionInternal::print_out(), casadi::MXFunction::print_res(), casadi::SXFunction::print_res(), and casadi::FunctionInternal::serialize_body().
| bool casadi::Blocksqp::print_header_ |
Definition at line 339 of file blocksqp.hpp.
Referenced by Blocksqp(), init(), serialize_body(), and solve().
|
inherited |
Definition at line 1382 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::change_option(), casadi::FunctionInternal::eval_gen(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::generate_options(), casadi::FunctionInternal::init(), and casadi::FunctionInternal::serialize_body().
| bool casadi::Blocksqp::print_iteration_ |
Definition at line 340 of file blocksqp.hpp.
Referenced by Blocksqp(), feasibilityRestorationPhase(), init(), run(), and serialize_body().
| bool casadi::Blocksqp::print_maxit_reached_ |
Definition at line 400 of file blocksqp.hpp.
Referenced by Blocksqp(), init(), serialize_body(), and solve().
|
inherited |
Definition at line 1383 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::change_option(), casadi::FunctionInternal::eval_gen(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::generate_options(), casadi::FunctionInternal::init(), and casadi::FunctionInternal::serialize_body().
|
inherited |
Definition at line 252 of file function_internal.hpp.
Referenced by casadi::FixedStepIntegrator::create_advanced(), casadi::ProtoFunction::generate_options(), casadi::ProtoFunction::init(), casadi::FunctionInternal::init(), casadi::Nlpsol::Nlpsol(), casadi::ProtoFunction::print_time(), casadi::ProtoFunction::ProtoFunction(), and casadi::ProtoFunction::serialize_body().
| bool casadi::Blocksqp::qp_init_ |
Definition at line 355 of file blocksqp.hpp.
Referenced by Blocksqp(), init(), serialize_body(), and solve().
|
inherited |
Definition at line 255 of file function_internal.hpp.
Referenced by casadi::ProtoFunction::generate_options(), casadi::ProtoFunction::init(), casadi::FunctionInternal::init(), casadi::ProtoFunction::init_mem(), casadi::LinsolInternal::init_mem(), casadi::ProtoFunction::ProtoFunction(), and casadi::ProtoFunction::serialize_body().
|
inherited |
Definition at line 258 of file function_internal.hpp.
Referenced by casadi::OracleFunction::calc_function(), casadi::ProtoFunction::change_option(), casadi::FunctionInternal::eval_gen(), casadi::FunctionInternal::FunctionInternal(), casadi::ProtoFunction::generate_options(), casadi::ProtoFunction::init(), casadi::ProtoFunction::ProtoFunction(), and casadi::ProtoFunction::serialize_body().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_nm
Definition at line 1317 of file function_internal.hpp.
Referenced by casadi::GenericExternal::any_symbol_found(), casadi::External::codegen_declarations(), casadi::External::codegen_release(), casadi::FunctionInternal::eval_gen(), casadi::FunctionInternal::finalize(), casadi::FunctionInternal::FunctionInternal(), casadi::GenericExternal::init_external(), and casadi::FunctionBuffer::~FunctionBuffer().
| bool casadi::Blocksqp::restore_feas_ |
Definition at line 348 of file blocksqp.hpp.
Referenced by Blocksqp(), feasibilityRestorationPhase(), init(), run(), and serialize_body().
|
inherited |
Definition at line 1401 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::generate_options(), casadi::FunctionInternal::init(), casadi::FunctionInternal::reverse(), and casadi::FunctionInternal::serialize_body().
| double casadi::Blocksqp::rho_ |
Definition at line 397 of file blocksqp.hpp.
Referenced by Blocksqp(), init(), and serialize_body().
| Function casadi::Blocksqp::rp_solver_ |
Definition at line 399 of file blocksqp.hpp.
Referenced by Blocksqp(), feasibilityRestorationPhase(), init(), and serialize_body().
| double casadi::Blocksqp::s_f_ |
Definition at line 387 of file blocksqp.hpp.
Referenced by Blocksqp(), filterLineSearch(), init(), and serialize_body().
| double casadi::Blocksqp::s_theta_ |
Definition at line 386 of file blocksqp.hpp.
Referenced by Blocksqp(), filterLineSearch(), init(), and serialize_body().
| bool casadi::Blocksqp::schur_ |
Definition at line 346 of file blocksqp.hpp.
Referenced by Blocksqp(), init(), init_mem(), printInfo(), serialize_body(), solve(), and solveQP().
|
inherited |
Definition at line 81 of file nlpsol_impl.hpp.
Referenced by casadi::Nlpsol::get_forward(), casadi::Nlpsol::get_reverse(), casadi::Nlpsol::init(), casadi::Nlpsol::Nlpsol(), and casadi::Nlpsol::serialize_body().
|
inherited |
Definition at line 82 of file nlpsol_impl.hpp.
Referenced by casadi::Nlpsol::get_forward(), casadi::Nlpsol::get_reverse(), casadi::Nlpsol::init(), casadi::Nlpsol::Nlpsol(), and casadi::Nlpsol::serialize_body().
|
protectedinherited |
Definition at line 90 of file oracle_function.hpp.
Referenced by casadi::OracleFunction::calc_function(), casadi::AlpaqaProblem::eval_f(), casadi::BonminUserClass::eval_f(), casadi::IpoptUserClass::eval_f(), casadi::AlpaqaProblem::eval_f_grad_f(), casadi::AlpaqaProblem::eval_g(), casadi::BonminUserClass::eval_g(), casadi::IpoptUserClass::eval_g(), casadi::BonminUserClass::eval_grad_f(), casadi::IpoptUserClass::eval_grad_f(), casadi::AlpaqaProblem::eval_grad_L(), casadi::BonminUserClass::eval_h(), casadi::IpoptUserClass::eval_h(), casadi::AlpaqaProblem::eval_hess_L(), casadi::AlpaqaProblem::eval_hess_L_prod(), casadi::AlpaqaProblem::eval_hess_ψ(), casadi::AlpaqaProblem::eval_hess_ψ_prod(), casadi::AlpaqaProblem::eval_jac_g(), casadi::BonminUserClass::eval_jac_g(), casadi::IpoptUserClass::eval_jac_g(), casadi::AlpaqaProblem::eval_ψ(), casadi::AlpaqaProblem::eval_ψ_grad_ψ(), casadi::OracleFunction::init(), casadi::OracleFunction::OracleFunction(), and casadi::OracleFunction::serialize_body().
| bool casadi::Blocksqp::skip_first_globalization_ |
Definition at line 372 of file blocksqp.hpp.
Referenced by Blocksqp(), init(), run(), and serialize_body().
|
staticinherited |
Definition at line 283 of file nlpsol_impl.hpp.
|
inherited |
Definition at line 1272 of file function_internal.hpp.
Referenced by casadi::SXFunction::ad_forward(), casadi::SXFunction::ad_reverse(), casadi::CodeGenerator::add(), casadi::FunctionInternal::all_scalar(), casadi::Switch::codegen_body(), casadi::FunctionInternal::codegen_meta(), casadi::FunctionInternal::codegen_sparsities(), casadi::FunctionInternal::definition(), casadi::FunctionInternal::eval(), casadi::Switch::eval(), casadi::SXFunction::eval_mx(), casadi::Switch::eval_sx(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::init(), casadi::Switch::init(), casadi::ImplicitToNlp::init(), casadi::JitFunction::JitFunction(), casadi::FunctionInternal::mapsum_mx(), casadi::FunctionInternal::print_dimensions(), casadi::FunctionInternal::print_in(), casadi::FunctionInternal::serialize_body(), and casadi::HpmpcInterface::solve().
|
inherited |
Definition at line 1272 of file function_internal.hpp.
Referenced by casadi::SXFunction::ad_forward(), casadi::SXFunction::ad_reverse(), casadi::FunctionInternal::all_scalar(), casadi::Switch::codegen_body(), casadi::FunctionInternal::codegen_meta(), casadi::FunctionInternal::codegen_sparsities(), casadi::FunctionInternal::definition(), casadi::FunctionInternal::eval(), casadi::Switch::eval(), casadi::SXFunction::eval_mx(), casadi::Switch::eval_sx(), casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::get_jac_sparsity(), casadi::FunctionInternal::init(), casadi::Nlpsol::init(), casadi::Switch::init(), casadi::JitFunction::JitFunction(), casadi::FunctionInternal::print_dimensions(), casadi::FunctionInternal::print_out(), and casadi::FunctionInternal::serialize_body().
|
protectedinherited |
Definition at line 87 of file oracle_function.hpp.
Referenced by casadi::OracleFunction::create_function(), casadi::OracleFunction::finalize(), casadi::OracleFunction::init(), casadi::OracleFunction::OracleFunction(), and casadi::OracleFunction::serialize_body().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_nn
Definition at line 1322 of file function_internal.hpp.
|
protectedinherited |
Definition at line 110 of file oracle_function.hpp.
Referenced by casadi::OracleFunction::finalize(), casadi::OracleFunction::init(), casadi::OracleFunction::OracleFunction(), casadi::OracleFunction::serialize_body(), and casadi::OracleFunction::set_temp().
|
protectedinherited |
Definition at line 110 of file oracle_function.hpp.
Referenced by casadi::OracleFunction::finalize(), casadi::OracleFunction::init(), casadi::OracleFunction::OracleFunction(), casadi::OracleFunction::serialize_body(), and casadi::OracleFunction::set_temp().
|
protectedinherited |
Definition at line 110 of file oracle_function.hpp.
Referenced by casadi::OracleFunction::finalize(), casadi::OracleFunction::init(), casadi::OracleFunction::OracleFunction(), casadi::OracleFunction::serialize_body(), and casadi::OracleFunction::set_temp().
|
protectedinherited |
Definition at line 110 of file oracle_function.hpp.
Referenced by casadi::OracleFunction::finalize(), casadi::OracleFunction::init(), casadi::OracleFunction::OracleFunction(), casadi::OracleFunction::serialize_body(), and casadi::OracleFunction::set_temp().
| double casadi::Blocksqp::theta_max_ |
Definition at line 383 of file blocksqp.hpp.
Referenced by Blocksqp(), init(), initializeFilter(), initIterate(), and serialize_body().
| double casadi::Blocksqp::theta_min_ |
Definition at line 384 of file blocksqp.hpp.
Referenced by Blocksqp(), filterLineSearch(), init(), secondOrderCorrection(), and serialize_body().
|
inherited |
Definition at line 1349 of file function_internal.hpp.
Referenced by casadi::FunctionInternal::FunctionInternal(), casadi::FunctionInternal::generate_options(), and casadi::FunctionInternal::init().
|
inherited |
Definition at line 249 of file function_internal.hpp.
Referenced by casadi::MXFunction::ad_forward(), casadi::SXFunction::ad_forward(), casadi::MXFunction::ad_reverse(), casadi::SXFunction::ad_reverse(), casadi::Integrator::advance(), casadi::ProtoFunction::change_option(), casadi::BSplineInterpolant::construct_graph(), casadi::OracleFunction::create_function(), casadi::FmuFunction::eval(), casadi::Integrator::eval(), casadi::MXFunction::eval(), casadi::SXFunction::eval(), casadi::MXFunction::eval_mx(), casadi::SXFunction::eval_mx(), casadi::SXFunction::eval_sx(), casadi::FmuFunction::factory(), casadi::FunctionInternal::finalize(), casadi::KinsolInterface::func(), casadi::ProtoFunction::generate_options(), casadi::FmuFunction::get_forward(), casadi::Integrator::get_forward(), casadi::Integrator::get_forward_dae(), casadi::FunctionInternal::get_jac_sparsity_gen(), casadi::FunctionInternal::get_jac_sparsity_hierarchical(), casadi::FunctionInternal::get_jac_sparsity_hierarchical_symm(), casadi::FmuFunction::get_jacobian(), casadi::FunctionInternal::get_partition(), casadi::FmuFunction::get_reverse(), casadi::Integrator::get_reverse(), casadi::ProtoFunction::init(), casadi::FiniteDiff::init(), casadi::FmuFunction::init(), casadi::FunctionInternal::init(), casadi::MXFunction::init(), casadi::SXFunction::init(), init(), casadi::FatropConicInterface::init(), casadi::FatropInterface::init(), casadi::HpipmInterface::init(), casadi::HpmpcInterface::init(), casadi::IpoptInterface::init(), casadi::MadnlpInterface::init(), casadi::CvodesInterface::init(), casadi::IdasInterface::init(), casadi::Feasiblesqpmethod::init(), casadi::Scpgen::init(), casadi::Sqpmethod::init(), casadi::IpoptInterface::init_mem(), casadi::IdasInterface::init_mem(), casadi::SXFunction::instructions_sx(), casadi::BonminInterface::intermediate_callback(), casadi::OracleFunction::jit_dependencies(), casadi::CsparseInterface::nfact(), casadi::LapackLu::nfact(), casadi::LapackQr::nfact(), casadi::LinsolQr::nfact(), casadi::Integrator::predict_events(), casadi::ProtoFunction::ProtoFunction(), casadi::CvodesInterface::reset(), casadi::IdasInterface::reset(), casadi::IdasInterface::resetB(), casadi::ProtoFunction::serialize_body(), casadi::CbcInterface::solve(), casadi::ClpInterface::solve(), casadi::CplexInterface::solve(), casadi::GurobiInterface::solve(), casadi::HpipmInterface::solve(), casadi::QpoasesInterface::solve(), casadi::Ipqp::solve(), casadi::Qrqp::solve(), casadi::AlpaqaInterface::solve(), casadi::AmplInterface::solve(), casadi::SnoptInterface::solve(), casadi::KinsolInterface::solve(), casadi::WorhpInterface::solve(), casadi::Newton::solve(), casadi::Qrsqp::solve(), casadi::Scpgen::solve(), casadi::Sqpmethod::solve(), casadi::Sqpmethod::solve_ela_QP(), casadi::Feasiblesqpmethod::solve_LP(), casadi::Feasiblesqpmethod::solve_QP(), casadi::Qrsqp::solve_QP(), casadi::Sqpmethod::solve_QP(), casadi::Integrator::sp_forward(), casadi::Integrator::sp_reverse(), and casadi::Integrator::trigger_event().
| bool casadi::Blocksqp::warmstart_ |
Definition at line 354 of file blocksqp.hpp.
Referenced by Blocksqp(), init(), serialize_body(), solve(), and solveQP().
|
inherited |
Extra doc: https://github.com/casadi/casadi/wiki/L_1nk
Definition at line 94 of file nlpsol_impl.hpp.
Referenced by casadi::Nlpsol::check_inputs(), casadi::Nlpsol::init(), casadi::Nlpsol::Nlpsol(), and casadi::Nlpsol::serialize_body().
| casadi_int casadi::Blocksqp::which_second_derv_ |
Definition at line 370 of file blocksqp.hpp.
Referenced by Blocksqp(), calcHessianUpdate(), calcHessianUpdateLimitedMemory(), calcInitialHessian(), computeNextHessian(), init(), resetHessian(), serialize_body(), and solveQP().
| double casadi::Blocksqp::zeta_ |
Definition at line 398 of file blocksqp.hpp.
Referenced by Blocksqp(), init(), and serialize_body().
